
英文题目:Material-like robotic collectives with spatiotemporal control of strength and shape
中文题目: 具有强度和形状时空控制的类材料机器人集群
作者:Matthew R. Devlin, Sangwoo Kim, Otger Campas, Elliot W. Hawkes(通讯)
作者单位: 美国加州大学圣塔芭芭拉分校、德国德累斯顿工业大学
期刊:Science(IF 45.8中科院一区,JCR一区)
发表时间:2025年2月21日
链接:https://www.science.org/doi/10.1126/science.ads7942
引文格式:Devlin M R, Kim S, Campas O, et al. Material-like robotic collectives with spatiotemporal control of strength and shape[J]. Science, 2025, 387(6736): 880-885.
01 全文速览如果有一堆小机器人,平时像固体一样坚硬,能撑起重物;需要变形时又能像流体一样“熔化”,流动成任意形状,然后再变回固体——这听起来像是科幻片里的情节。
加州大学圣塔芭芭拉分校和德累斯顿工业大学的研究团队从胚胎发育中找到了灵感,真的把这变成了现实。他们发现,胚胎组织之所以能一边保持强度一边重塑形状,靠的是细胞之间精妙的拓扑重排。他们把这一机制“编码”进一个个小机器人里,让它们组成的集群能够像活体组织一样,在固态和流态之间自由切换。
这个机器人集群的单个单元重约1.3牛(约130克),但整个集群能撑起700牛顿的重物——相当于一个成年人站上去。需要变形时,只需要改变单元间的相互作用力,集群就能局部“液化”,流动成新形状,甚至能像伤口愈合一样填补缺损,或者像变形金刚一样把自己变成一把“扳手”去旋转物体。
核心亮点:
- ✅ 刚柔切换:从固态到流态,可在集群内任意位置、任意时间控制
- ✅ 强度惊人:支撑700牛顿(约70公斤),是单机重量的500多倍
- ✅ 自修复:移除部分单元后,集群能流动填补空洞
- ✅ 可变形:能主动拉长、弯曲,形成拱形等结构
- ✅ 工具化:能“熔化”后包裹物体,凝固后变成扳手旋转物体
02 研究内容
🧬 灵感来源:胚胎组织如何既强又柔?
图1A-B展示了胚胎发育中的两个关键机制。左边是汇聚延伸(convergent extension):细胞在特定方向上极化,通过定向重排让组织在一个方向上变窄,垂直方向上拉长。右边是组织液化(tissue fluidization):细胞通过主动的力波动,让原本固态的组织暂时变得像液体一样,可以重塑形状。
这两个机制的核心都是细胞间的拓扑重排——也就是T1转变(图1A中画的四细胞重排)。细胞不改变体积,只改变邻居关系,就能让整个组织变形。
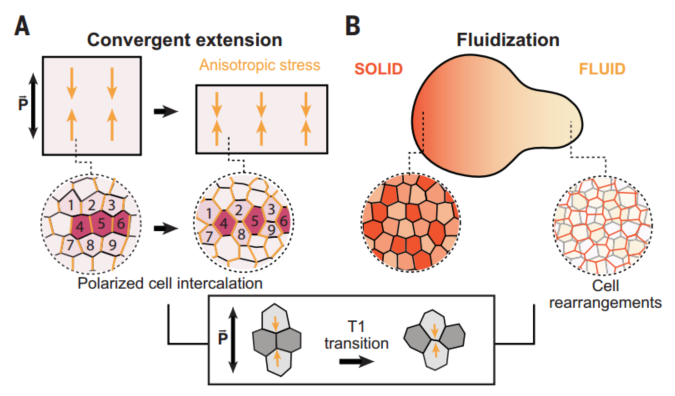
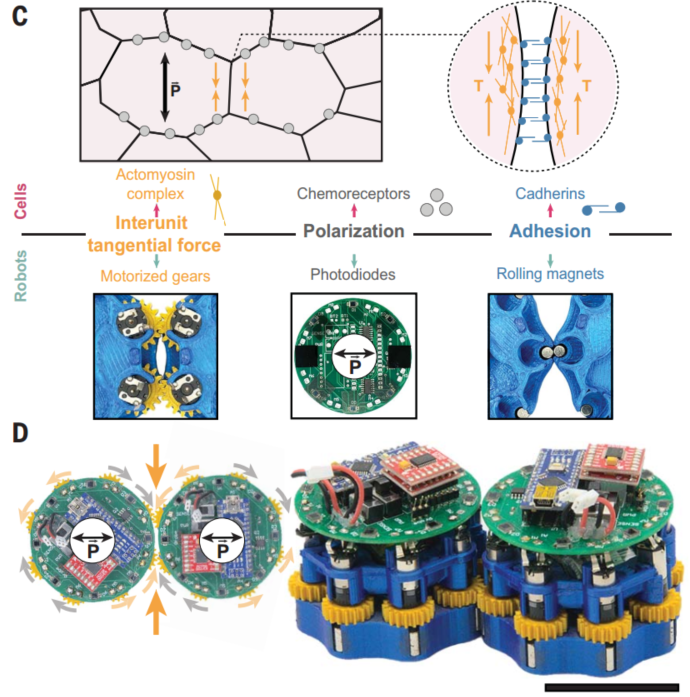
图 1. 将关键细胞行为编码到机器人集合中。(A) 胚胎组织通过会聚延伸来伸长,这涉及组织中细胞沿特定方向的极化,从而能够协调细胞之间的主动应力,从而导致特定空间方向上的优先细胞重排(T1 转换)。 (B) 波动的活跃细胞应激可以通过主动引起细胞重排(T1 转变)来驱动胚胎发生过程中的组织流化,从而在形态发生过程中实现组织重塑。 (C) 控制胚胎组织中细胞之间机械相互作用的关键细胞过程(单元间力产生、极化和粘附)的草图。这些细胞过程中的每一个都被编码到机器人单元中:对于单元间的力产生,肌动球蛋白复合物被映射到机动齿轮;对于偏振,化学感受器被映射到带有偏振滤光片的光电二极管;为了粘附,钙粘蛋白被映射到滚动磁体。机器人单元使用与生物学正交的极性方向约定。 (D) 两个机器人单元的照片,顶视图(左)和等距视图(右)。显示了电动齿轮的旋转方向,以及施加到相邻单元的净力。比例尺:5 厘米。
🤖 从细胞到机器人:三大核心功能
图1C把细胞的关键功能映射到了机器人上:
- 力产生:细胞用肌球蛋白复合体产生张力,机器人用电机驱动的齿轮在接触面产生切向力(图1C上)。每个单元周围有8个齿轮,只有部分齿暴露,与邻居的齿轮啮合,可以产生可控的切向力。
- 极化:细胞接收化学信号确定方向,机器人用光电二极管+偏振片感知全局偏振光,从而确定自己的“极性”方向(图1C中)。
- 黏附:细胞用钙黏蛋白相互黏附,机器人用可滚动的磁铁实现方向无关的黏附(图1C下)。磁铁是径向磁化的,可以在小腔里自由滚动,不管机器人单元相对方向如何,都能产生吸力。
图1D是实物照片,每个单元直径约10厘米,周围一圈齿轮清晰可见。
Movie S1:仿真中单元间相互作用力展示
视频S1展示了仿真中单元间的相互作用力如何产生和传递,为理解后续实验打下基础。
🧪 基本单元实验:4单元和3单元
图2A定义了两个关键参数:平均力


图2B-C是4单元系统的T1转变实验。当平均力超过阈值,或者波动幅度超过阈值时,四个单元会沿着极化方向发生重排。图2D是实验和仿真结果的对比,显示平均力和波动幅度可以协同作用——波动越大,需要的平均力越小。
Movie S2:4单元T1转变实验
视频S2可以直观看到四个单元在力作用下发生的拓扑重排过程。
图2E-H是3单元系统的屈服实验。在没有内部力的时候,3单元系统能抵抗142牛的外力才被拉开(图2F)。激活内部力后,屈服强度下降(图2G)。图2H展示了平均力和波动幅度对屈服强度的联合影响——高平均力+高波动,屈服强度最低。
Movie S3:3单元屈服实验
视频S3展示了三个单元在外力作用下的屈服过程。
图2I-J是功耗对比。有意思的是,引入力波动后,驱动重排所需的平均功率显著降低。这说明波动帮助系统越过能量壁垒,让重排更省力。
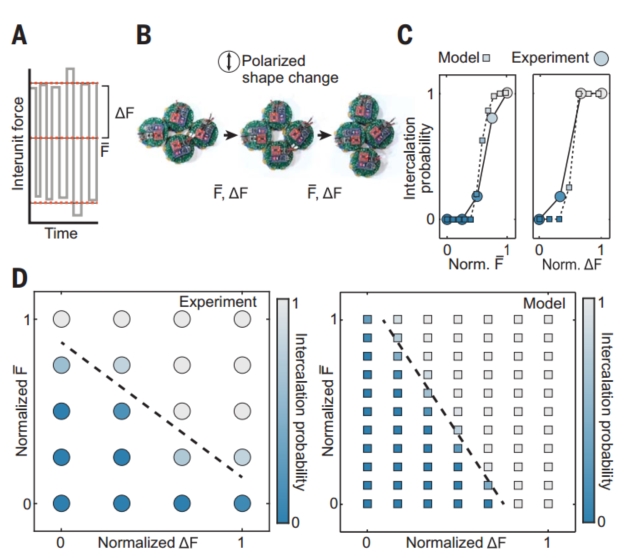
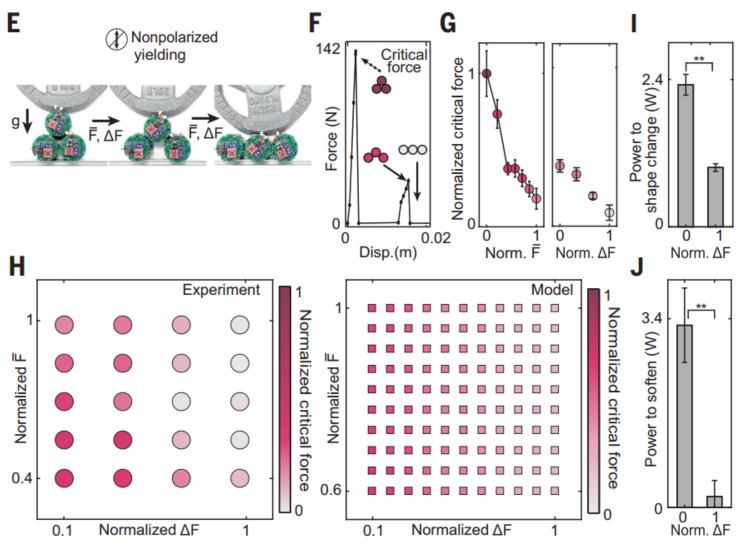
图 2:重新排列使机器人集体的基本“构件”的形状和强度发生变化。 (A) 单元间切向力分布有两个关键参数:平均值 (F) 和波动幅度 (ΔF)。 (B) 极化 4 块的 T1 跃迁。 (C) 4 块中的 T1 转移概率作为左侧的单元间力 F(对于低波动幅度 ΔF)和右侧的力波动幅度ΔF(对于低单元间力 F)的函数。 F 和 DF 始终标准化为全范围。 (D) 实验测量(左)和计算(右)针对不同 F 和 ΔF 的 T1 转移概率。每个点:N = 10 次试验。 (E) 由于波动的单元间力降低了屈服强度,在外部施加的载荷下非极化 3 块屈服。 (F) 在没有单元间力的 3 块中屈服需要 142 N 的外部载荷。 (G) 临界力,标准化为最大值,作为增加单元间力(左)和波动幅度(右)的函数。 (H) 实验(左)和模拟(右)中的临界力作为单元间力 F 和波动幅度ΔF 的函数。 N = 10 次试验。(I) 在高波动情况下,驱动 T1 转换所需的功率显着降低(N = 10 次试验,P < 0.01)。 (J) 在施加的外部负载下驱动单元重新布置所需的功率在高波动下明显较低(N = 5 次试验,P < 0.01)。误差线(G、I、J)代表一个标准误差。
🏗️ 扩展到多单元集群
图3A展示了极化后的集群(19个实物单元,217个仿真单元)沿着极化方向拉长,就像胚胎组织的汇聚延伸。
图3B展示了空间控制能力:只让集群上半部分激活波动和力,结果只有上半部分拉长,下半部分保持不动。
图3C-F量化了重排次数和长宽比的变化。波动幅度越大,重排次数越多,长宽比变化越快。
图3G-H是屈服实验:没有波动时,集群能抵抗外力不变形;激活波动后,集群被外力压扁。而且可以只让局部区域激活波动,实现局部液化(图3H)。
Movie S4:多单元集群拉长和屈服实验
视频S4展示了多单元集群在极化力作用下的拉长过程,以及在外力作用下的屈服行为。
Movie S5:改变极化方向后集群重新定向
视频S5展示了在拉长过程中改变全局极化方向后,集群如何重新定向并继续沿新方向拉长。
图3I是应力-应变曲线:没有波动时,集群像脆性固体,强度高(每单元90牛);激活波动后,变成屈服应力材料,强度降到每单元6牛。图3J显示,屈服应力随波动幅度增大而单调下降,可调控范围接近一个数量级。
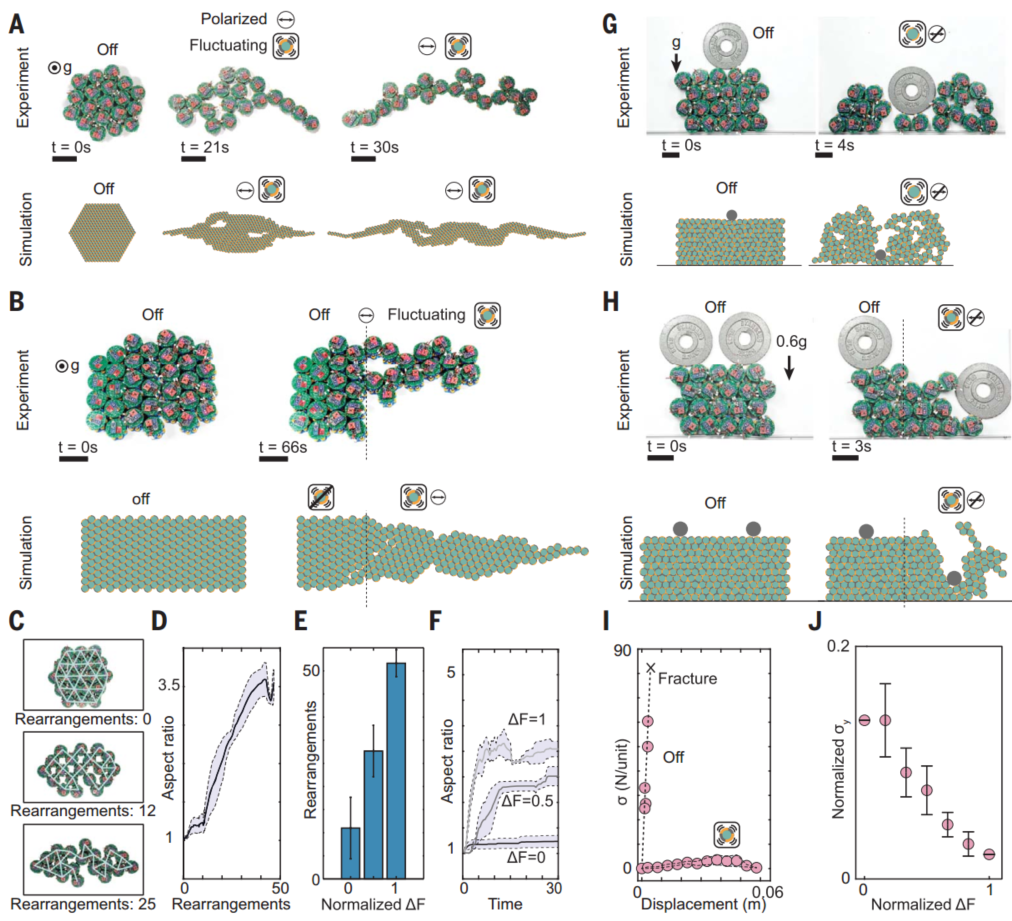
图 3.从基本构建块到机器人集体:将形状和强度控制扩展到多单元集体。 (A) 机器人和模拟集体在极化方向上伸长。圆角方形图标表示波动开启。机器人:19台,F=0:86;ΔF=1。模拟:217 个单位,F=1; ΔF=1。整个图中所有 F 和ΔF均归一化为全范围。 (B) 伸长仅在波动力开启时发生。实验:(左)F=0; ΔF=0; (右)FΔ0:57; ΔF=0:5。模拟:(左)F=1; ΔF=0; (右)F=1;ΔF=1。(C) 单位之间的联系网络图。 (D) 长宽比直接取决于单元重新排列。 N = 3 次试验。 (E) 重排的数量随着波动幅度的增加而增加。 N = 3 次试验。 (F) 随着波动幅度的增加,纵横比变化得更快。 N = 3 次试验。 (G) 力波动的引入(右)降低了屈服强度,并且载荷使集体变形。实验:(左)F =0;ΔF=0; (右)F=1; ΔF=1。模拟:(左)F=0;ΔF=0; (右)F 1/4 1; DF 1/4 1。 (H) 某一区域的力波动仅会降低该区域的屈服强度。实验:(左)F =0; DF=0; (右)F =1; ΔF=1。模拟:(左)F=0; ΔF=0; (右)F=1; ΔF=1. (I) 20 单元机器人集体的应力-应变关系。当波动关闭时,强度(每单位 90 N)和刚度(每单位每米 20,190 N)很高。当打开时,强度下降至每单位 6 N,并且发生屈服。 N = 3 次试验。 (J) 屈服应力随着波动幅度的增加而减小。 N = 3 次试验。比例尺:10 厘米。阴影[(D)和(F)]和误差线[(E)和(J)]代表一个标准误差。
🎭 功能演示:从变形到工具
图4A是结构成型:集群先液化,重塑成两个柱状,然后柱顶合拢形成拱形,再凝固,最后能撑起重物。
图4B是自修复:从集群中移除一块单元,然后在缺损区域激活波动,周围的单元流入填补空洞,凝固后结构恢复。
图4C是物体操控:集群局部液化,流动起来对一个小物体施加力,把它推到目标位置。
图4D是工具形成:集群液化后包裹住一个六角形物体,然后凝固,变成一把“扳手”,旋转物体。
图4E是适应性支撑:集群固态时能撑起一个人(700牛,视频里可能是个小模型),然后“熔化”,在自重下流动摊平。
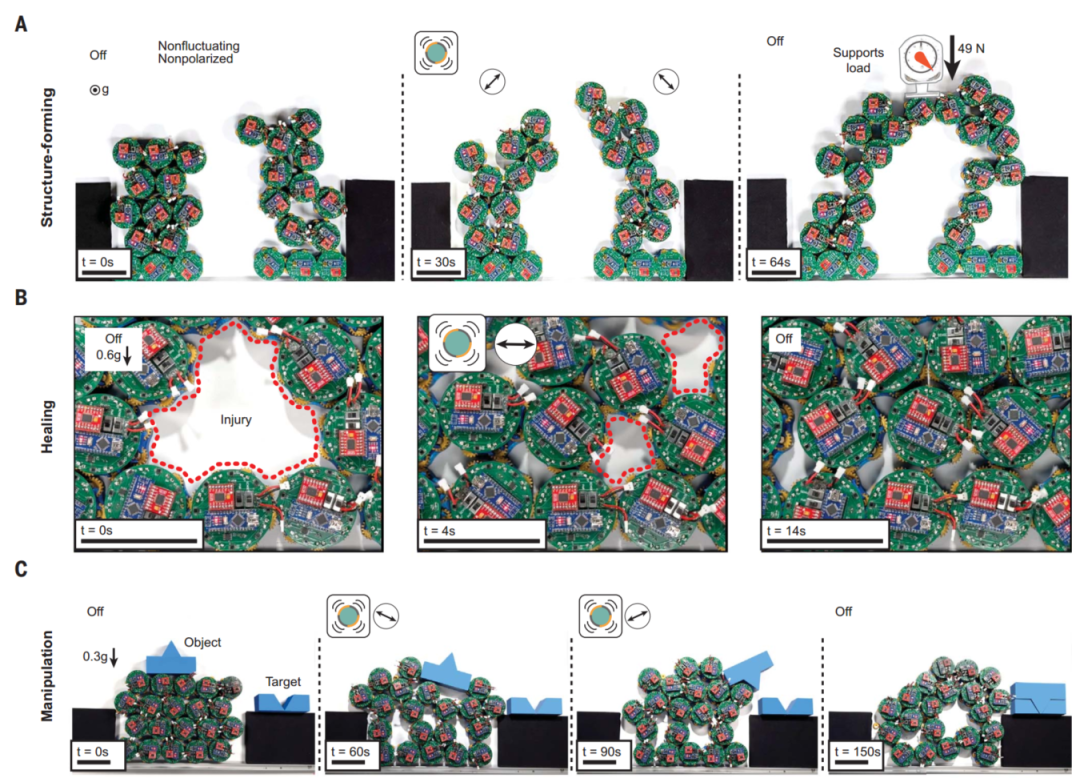
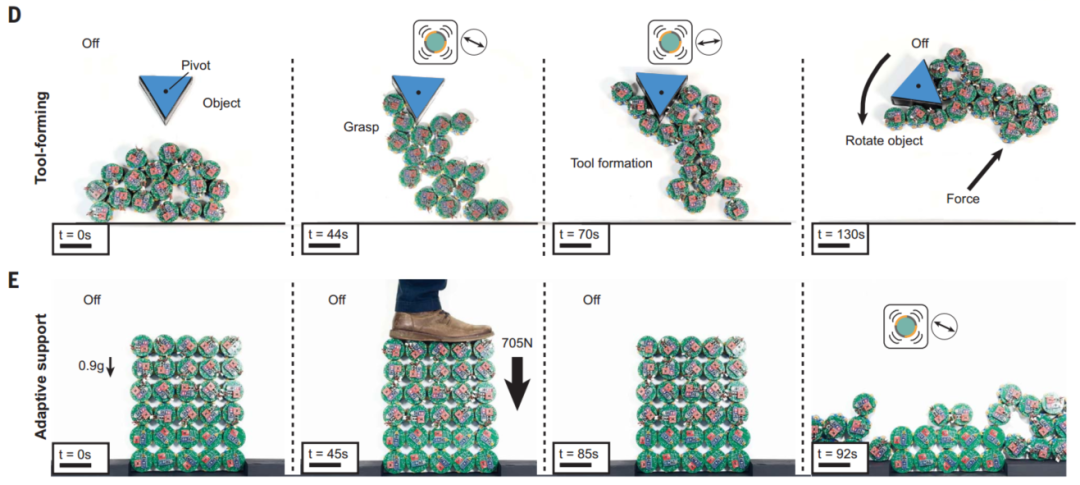
图 4.“机器人材料”行为的演示。 (A) 结构形成:集体可以流动,将自身重塑为拱形,然后重新凝固以用新形成的结构支撑负载。 (B) 治愈:当集体的一个区域被移除时,它可以经历刚性转变,局部流化集体,流动以填补空白。 (C) 操纵:集体内受控的局部流动可以移动物体。在这里,集体对物体施加力,将其引向目标。 (D) 工具形成:集体可以流动,围绕物体流动,然后硬化并充当“扳手”来旋转物体。 (E) 适应性支持:一个集体可以保持足够强大以支撑一个人(>700 N),然后在集体自身的重量下流动。比例尺:10 厘米。
Movie S6:功能演示合集(结构成型、修复、操控、工具、支撑)
视频S6包含了上述所有功能演示的完整过程,可以更直观地看到集群如何变形、修复、操控物体和承重。
03 创新点① 把生物学机制“编码”进机器人集群
之前有很多机器人集群能做形状变化,但大多只能在外围重排,内部单元动不了。这个工作直接借鉴胚胎发育的细胞行为——T1转变、极化、力波动——让集群能在内部发生拓扑重排,实现真正的体变形。
② 切向力驱动+齿轮设计
大多数集群机器人靠推地面或者滚动来移动,但要在紧密堆积的集群内部产生相对运动,需要切向力。他们用电机驱动齿轮,在接触面直接产生可控切向力,这个设计很巧妙。只有部分齿暴露,保证了齿轮只与邻居啮合,不会干扰更远的单元。
③ 力波动的引入和控制
把力波动作为控制参数,这个想法很有意思。通常我们追求精确控制,讨厌噪声。但他们发现,引入可控的波动可以帮助系统越过能量壁垒,降低重排所需的平均力,从而降低功耗(图2I-J)。这为设计节能的变形系统提供了新思路。
④ 空间+时间的独立控制
通过全局偏振光控制极化方向,通过局部开关波动控制液化区域,实现了在集群内任意位置、任意时间独立控制固态/流态切换。图3B和3H很直观地展示了这种空间选择性。
⑤ 定量化的力学表征
他们不是只做演示,而是系统地测量了屈服强度、应力-应变关系、功耗等关键力学量。图3I-J的曲线很清楚地展示了从固态到流态的转变,以及波动幅度对强度的定量影响。这为后续的理论建模和工程应用提供了数据基础。
04 总结与展望
这个工作最让人印象深刻的是概念的完整性。从生物学观察(胚胎组织的T1转变)到抽象出三个关键机制(力、极化、黏附),再到把这些机制物理实现到机器人上,最后用实验验证了从基本单元到多单元集群再到功能演示的整个链条。每一步都做得扎实,没有跳步。
从工程角度看,这为“可编程物质”提供了一个很具象的实现路径。现在的单元还比较大(~10厘米),但原理上可以小型化。如果能把单元做到毫米甚至微米级,再结合更复杂的控制算法,未来可能会出现真正的“智能材料”——平时是结构材料,需要时能变形、自修复、甚至对外界刺激作出反应。
未来研究将聚焦于以下几个方向:
🔸 规模化与小型化:目前的系统只有20个单元,仿真做到了几百个。要把单元做到更小、更多,需要在电机、电池、控制电路上做集成。MEMS技术可能是个方向。
🔸 更复杂的控制算法:目前用全局偏振光控制极化方向,用局部开关控制波动。如果引入更精细的反馈控制,比如每个单元能感知邻居的状态并自适应调整力,可能会涌现出更复杂的集体行为。
🔸 能源自主化:现在的机器人还是外接电源。要实现真正的自主,需要把电池和控制电路集成到单元内部,同时还要保证体积和重量可控。
🔸 环境适应能力:如果能感知外部载荷并自动调整强度和形状,比如支撑物倾斜时集群自动调整形状保持平衡,会更接近“智能材料”的愿景。
🔸 多尺度建模:从单个单元的动力学到几百个单元的集体行为,中间跨越了好几个尺度。发展能连接微观相互作用和宏观力学的多尺度模型,有助于理解和预测这类系统的行为。
🔸 与生物系统更深度的互动:既然灵感来自生物,反过来也可以用这个平台来验证生物学的假说。比如胚胎组织中力波动的作用、T1转变的能量学等问题,可以用这个机器人平台做物理模拟,为生物学家提供新的实验手段。
从一个想法到一堆能变形、承重、自修复的小机器人,这条路走得挺远。下一步,是让它们变得更小、更聪明、更能适应环境。