英文题目:Magnetosoft robots based on multi-materials optimizing and heat-assisted in-situ magnetic domains programming
中文题目: 基于多材料优化与热辅助原位磁畴编程的磁控软体机器人
作者:Fuzhou Niu, Qing Cao, Chonglei Hao, Xianglong Zheng, Jiaqi Jin, Xiaojie Li, Ying Li, Yang Hao, Dong Han(通讯)
作者单位: 苏州科技大学、浙江大学、哈尔滨工业大学(深圳)、合肥工业大学、深圳职业技术大学、苏州大学
期刊:International Journal of Extreme Manufacturing(IF 21.3,中科院一区,JCR一区)
发表时间:2025年6月10日
链接:https://doi.org/10.1088/2631-7990/adcd4a
引文格式:Niu F, Cao Q, Hao C, et al. Magnetosoft robots based on multi-materials optimizing and heat-assisted in-situ magnetic domains programming[J]. International Journal of Extreme Manufacturing, 2025, 7: 055506.
01 全文速览磁控软体机器人这几年挺火,无线控制、响应快、能游能爬,看着挺美好。但真要做出来,有两个坎不太好过:一是材料——要软得恰到好处,还得磁响应够强;二是磁畴编程——想让机器人按特定方式变形,需要在三维空间里把磁颗粒的取向排布好,传统的商用充磁机贵不说,还不好做复杂分布。
这篇文章给了一个挺实在的解决方案。他们把材料配方和磁化工艺放在一起优化,找到了一个兼顾力学性能和磁响应的配比(PDMS:Ecoflex=1:2,磁粉50%)。然后,他们发现一个有意思的现象:加热到120°C再磁化,效果比常温好一倍,磁化强度能达到9.5 mT,跟商用充磁机在700V激励下的水平差不多。
基于这个方法,他们做了六个不同类型的机器人(二维变形、旋转、四足爬行、抓取、球形运载),每个都配了视频演示。整个制造过程成本低、步骤少,不需要昂贵的设备。
核心亮点:
- ✅ 配方优化:PDMS和Ecoflex 1:2混搭+50% NdFeB磁粉,找到平衡点
- ✅ 加热磁化:120°C下磁化,强度比常温提升2倍(9.5 mT vs 4.8 mT)
- ✅ 效果对标:达到商用充磁机700V激励的磁化水平
- ✅ 六机联展:做了六个机器人,涵盖变形、旋转、爬行、抓取、运载
- ✅ 成本可控:无需昂贵设备,工艺简单
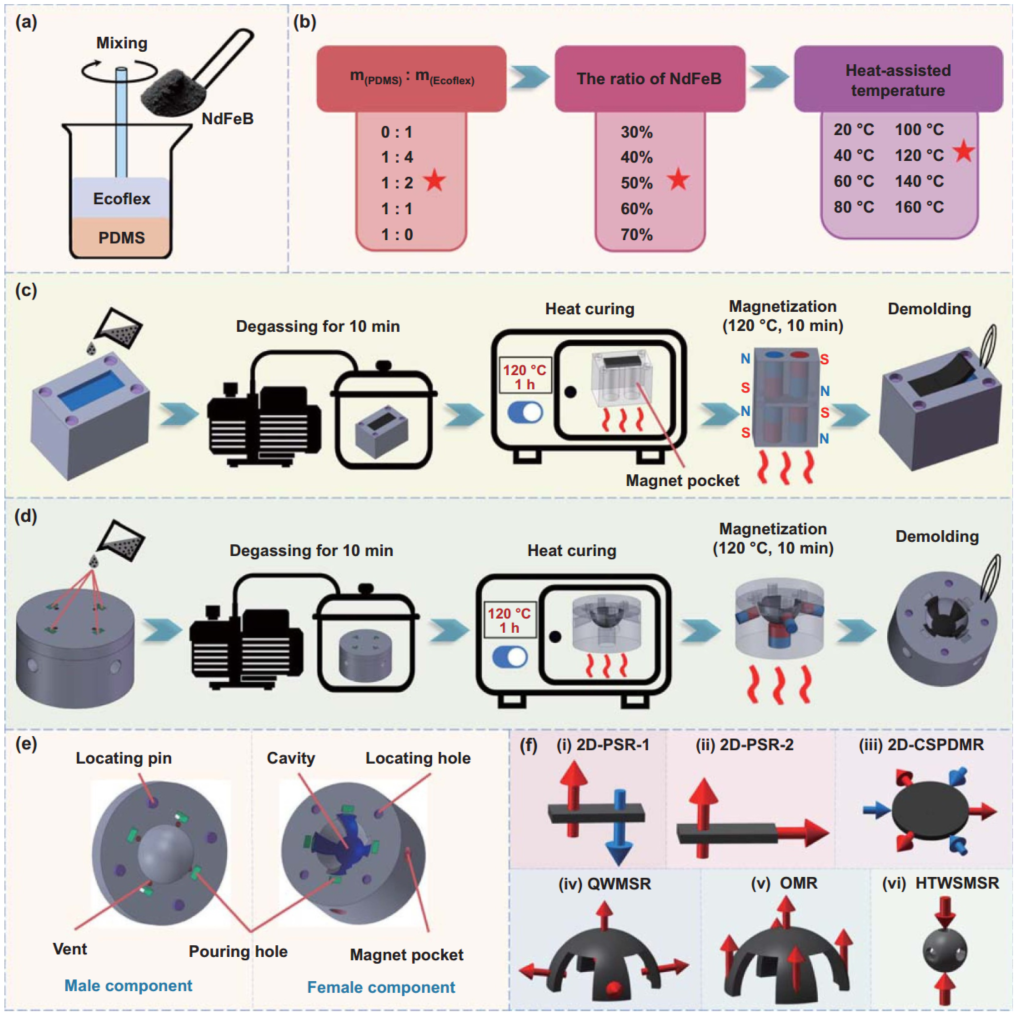
图 1. 具有编程 3D 分布式磁域的软磁机器人的热辅助原位集成成型制造方法。 (a)磁响应软材料的制备。 (b)探索这些材料的优化质量比,红星代表优化参数。 (c) 具有编程磁域的二维图案化磁软机器人的制造步骤,如图 3(a) 所示的 2D-PSR 所示。 (d) 具有可编程三维分布磁域的三维磁软机器人的制造步骤,如图 4 所示的 QWMSR 所示。 (e) 用于制造 QWMSR 的 3D 打印模具。 (f)本文制造的六个样本机器人的磁域分布图。用于机器人磁化的机器人外部磁场线的方向由红色和蓝色箭头表示。
02 研究内容🧪 材料优化:PDMS和Ecoflex怎么搭才顺手?
图2a展示了不同PDMS与Ecoflex质量比(1:0、1:4、1:2、1:1、0:1)下的应力-应变曲线,磁粉含量固定50%。结果挺清楚:1:2这个比例断裂伸长率最高,意味着它最不容易断,同时又保持了足够的强度。
图2b则固定了1:2的基体比例,改变磁粉含量(30%-70%)。50%是个分水岭——再往上加磁粉,材料变脆;再往下减,磁响应不够。最后定下来的配方就是:PDMS:Ecoflex=1:2 + 50% NdFeB磁粉。
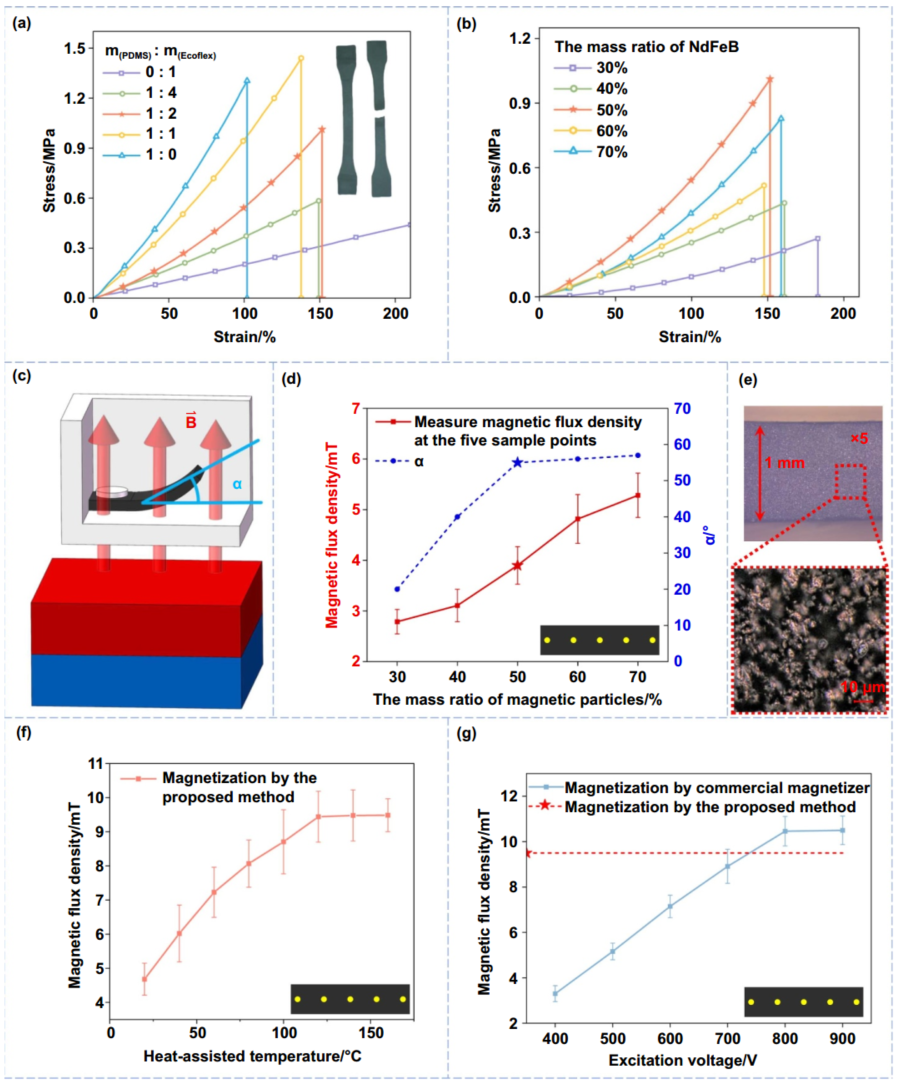
图2.磁响应软材料的优化制备和优化的热辅助原位磁化。 (a) 具有不同 PDMS 与 Ecoflex 质量比、同时保持恒定 50% 磁性颗粒含量的复合材料的应力应变曲线。 (b) 不同磁性颗粒质量比复合材料的应力-应变曲线。 (c)在给定磁场下测量磁化测试样品的弯曲角度的图。 (d) 具有不同磁性颗粒浓度的磁化测试样品所获得的测量磁通密度和弯曲角度。 (e) 磁化测试样品的微观横截面图。 (f) 磁化测试样品在不同温度下测量的磁通密度。 (g)商用磁化器和热辅助原位磁化技术磁化的比较。
🔥 核心发现:加热磁化,效果翻倍
图2f是这个工作最有意思的发现。他们把样品在不同温度下磁化,然后测表面磁通密度。从20°C到120°C,磁化强度从4.8 mT一路涨到9.5 mT,整整翻了一倍。超过120°C后基本持平。
图2g拿这个方法跟商用充磁机比了一下。商用充磁机从400V加到900V,到700V时磁化强度约9.5 mT,和加热法的峰值差不多。也就是说,用加热法+永久磁铁,能达到商用充磁机700V的效果——后者设备贵、操作复杂,加热法则简单得多。
原理上也不复杂:温度升高,磁颗粒的热激活能增加,在外磁场作用下更容易取向排列;冷却后取向被“冻”住。
🦾 六种机器人:一套方法,多种可能
① 2D-PSR:两种变形模式(图3)
图3展示了两个二维变形机器人。一个是对称磁化(图3a-c),磁场一加,左右两半分别朝不同方向弯,能弯成U形。另一个是不对称磁化(图3d-f),左边不动右边弯45°,证明通过磁畴设计可以实现局部变形控制。
② 2D-CSPDMR:原地旋转(图3g-i)
这个圆盘被分成六个磁化方向不同的扇区(图3h)。放在旋转磁场里,它会跟着转。图3i显示,在1-5 Hz范围内,转速和磁场频率呈线性关系;超过5 Hz就开始抖——这个“失步频率”给设计提了个醒。
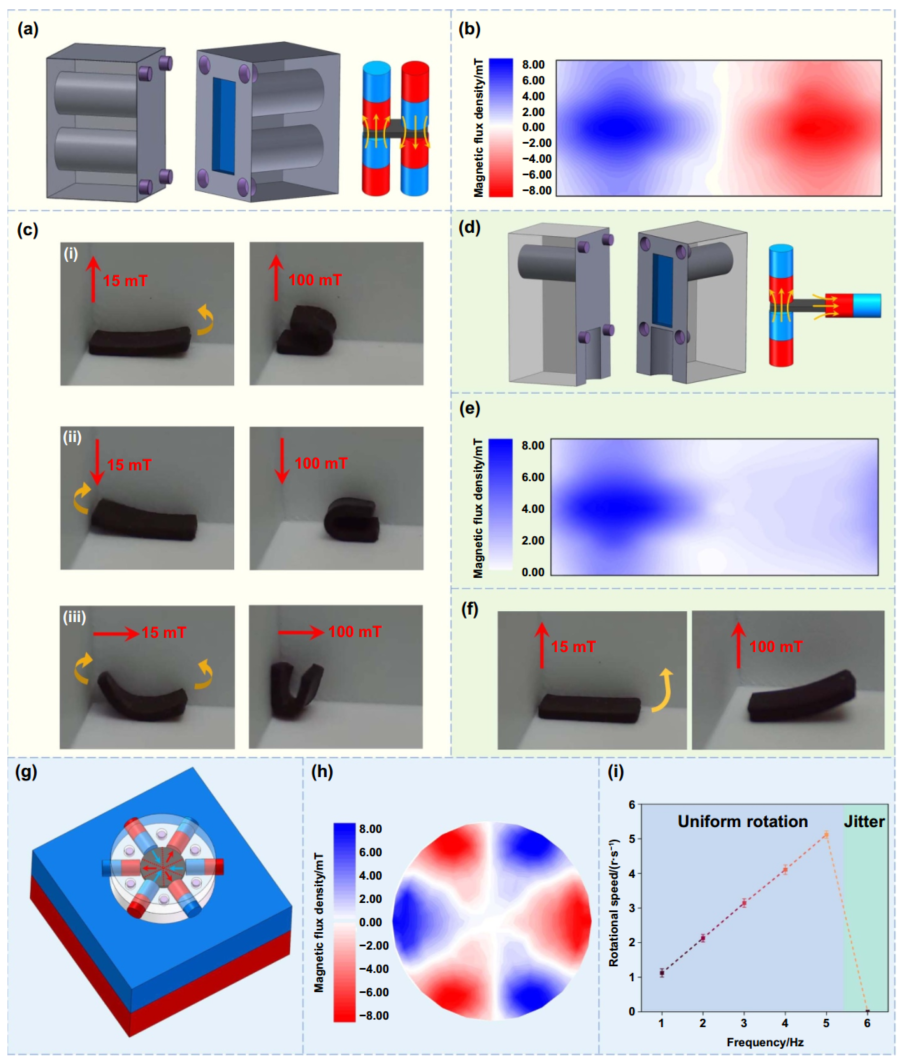
图 3.具有编程磁域的二维图案软机器人。 (a) 2D-PSR-1的模具和磁化图。(b) 2D-PSR-1 磁畴的对称分布。 (c) 2D-PSR-1在外部磁场下的变形能力。 (d) 2D-PSR-2的模具和磁化图。 (e) 2D-PSR-2 磁畴的不规则分布。(f) 2D-PSR-2 在外部磁场下的变形。 (g) 2D-CSPDMR 的模具和磁化图。 (h) 2D-CSPDMR 的磁畴分布。 (i) 2D-CSPDMR 的旋转速度作为外部磁场频率 (1–6 Hz) 的函数。
③ QWMSR:四足步行,能滚能爬(图4-5)
四足机器人每条腿按法向磁化,顶部轴向磁化。图4c-f记录了它的滚动过程:一个完整滚动能前进约50 mm。图4g-h是它的尺蠖式爬行,每周期前进约3 mm。
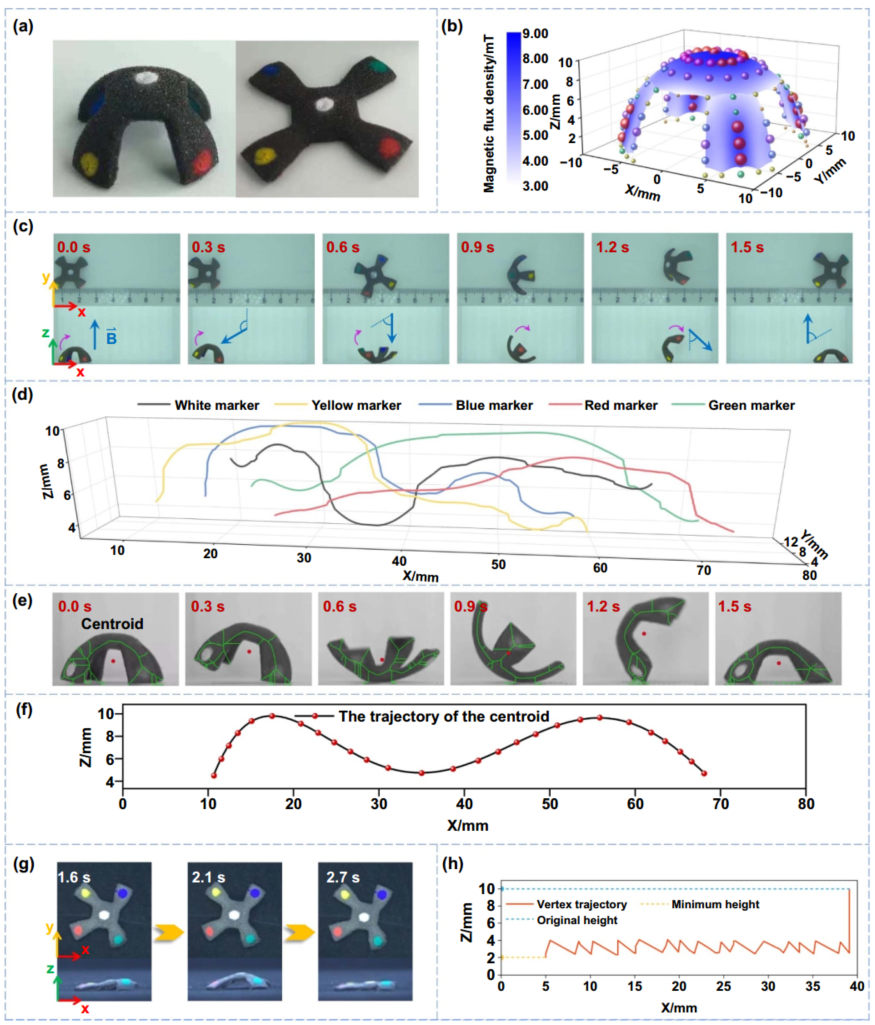
图 4.四足步行磁软机器人 (QWMSR)。 (a) QWMSR 原型。 (b) QWMSR 外表面点矩阵处的磁通密度。 (c)前视图(X-Y)和侧视图(X-Z)中记录的QWMSR滚动运动的时序图。 (d) 基于算法 1 的 QWMSR 四个腿和顶部的 5 个标记的滚动运动轨迹。 (e) 和 (f) 基于算法 2 的 QWMSR 骨架结构质心在 X-Z 平面上的滚动运动轨迹。 (g) QWMSR 模仿尺蠖的爬行运动:通过周期性的伸展和收缩向前运动。 (h) 顶部白色标记在 X-Z 平面上爬行时的轨迹。
图5展示了它的机动能力:能穿过4 mm高的窄缝(图5a),能翻过10 mm高的台阶(图5b),还能在迷宫里结合A算法避障(图5c)。
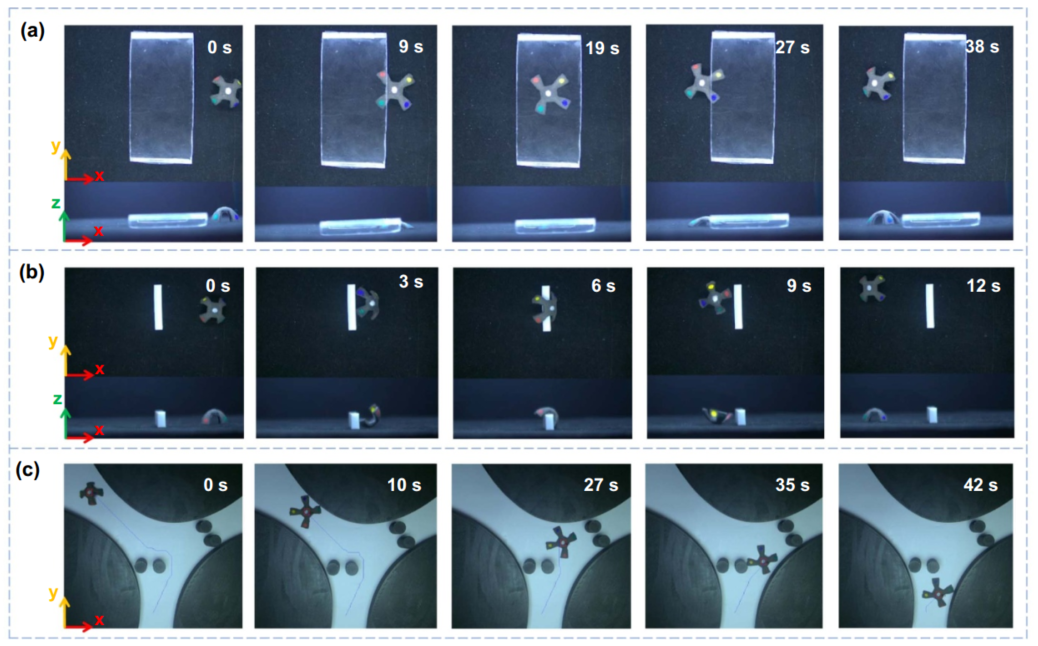
图 5. QWMSR 移动性演示。 (a) QWMSR 穿过一条 4 毫米高、50 毫米长的狭窄通道。 (b) QWMSR 爬过 10 毫米高的障碍物。 (c)基于A-star算法的有障碍物环境下的实时避障。
④ OMR:抓取搬运(图6)
这个机器人四条腿在磁场作用下会向中心聚拢(图6b)。在模拟血液粘度的硅油里,它能完成接近、抓取、运输、释放的全流程(图6c-d)。抓取对象有四面体、立方体、球体,都能搞定。
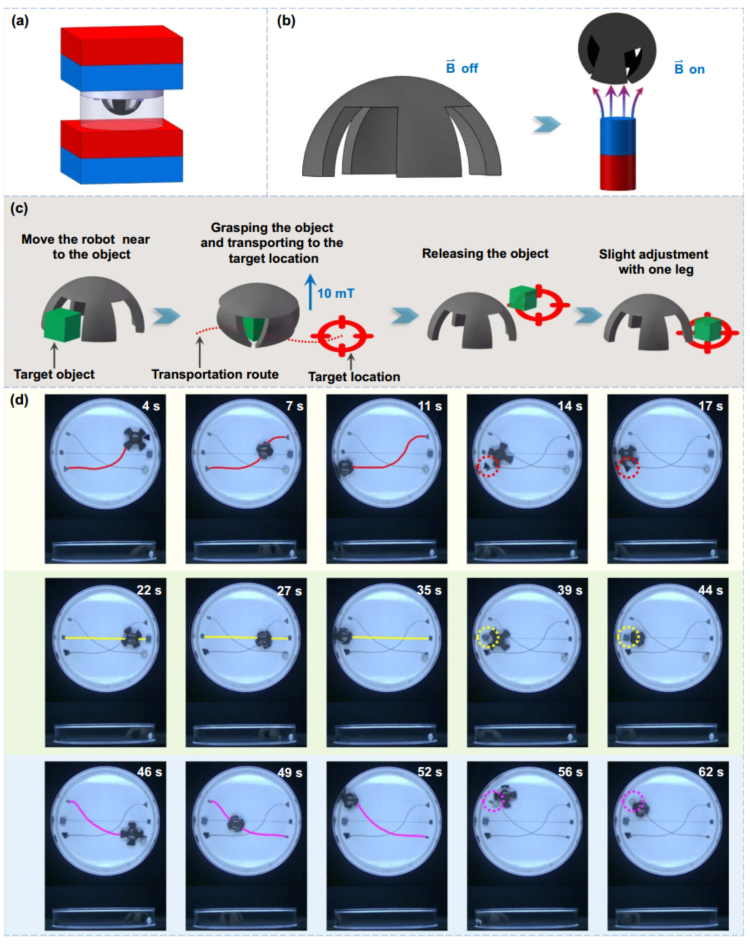
图 6. 对象操纵机器人 (OMR)。 (a) 使用热辅助原位磁化技术的 OMR 磁化图。(b) OMR抓取机制实现示意图。 (c) OMR运输任务示意图。 (d) OMR执行三种物体的运输任务。
⑤ HTWSMSR:空心球,运水放水(图7)
这个空心球(外径10 mm,内径7 mm)有五个对称分布的释放孔。制造用了三个模具,其中一个还是水溶性的(图7a-d)。图7e显示,加磁场后4.2秒内高度从10 mm压缩到5 mm。图7f展示了它运0.2 mL红墨水、然后在磁场下通过一个孔释放的过程,全程约7秒。
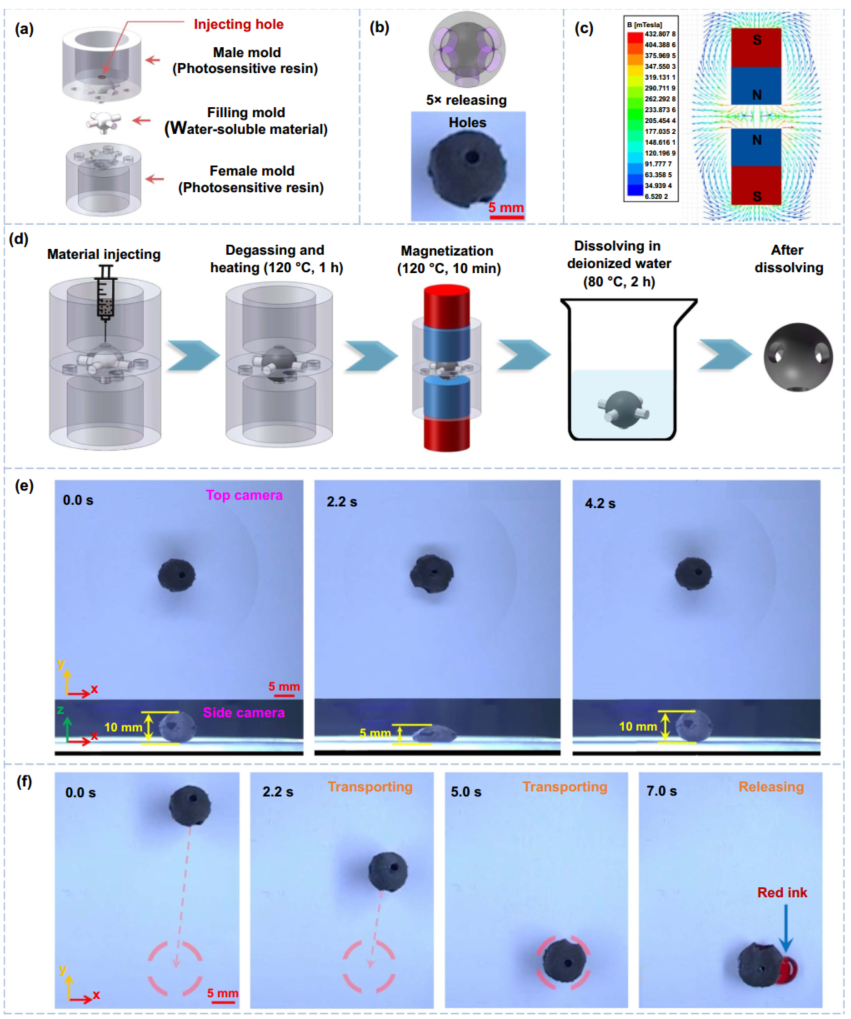
图 7. 中空薄壁球形软磁机器人 (HTWSMSR)。 (a) 用于制造 HTWSMSR 的三个模具的示意图。 (b) HTWSMSR 设计示意图,显示五个对称分布的释放孔和 HTWSMSR 原型。 (c) 磁化 HTWSMSR 的磁场的有限元模拟。 (d) 逐步制造过程。 (e) 从顶视图和侧视图中捕获的显示 HTWSMSR 变形行为的延时图像。 (f) 受控液体输送和释放的演示。
03 创新点① 材料和工艺一起优化,而不是分开调
很多研究是先定材料再找磁化方法,或者反过来。这篇文章把两个问题放在一起解:材料配比要找力学和磁响应的平衡点,磁化温度要找效果最好的点。最后得出的配方和120°C这个温度,是联立求解的结果。
② 120°C加热磁化,简单有效
这个发现的实用价值挺高。室温磁化效果一般,商用充磁机贵且操作复杂。加热到120°C再磁化,用普通的永久磁铁就能达到商用机700V的水平。而且这个温度正好是材料固化温度,可以把固化和磁化合并成一步。
③ 一次展示六种机器人,覆盖多种功能
二维变形、平面旋转、四足滚动爬行、抓取搬运、球形运载——这六个机器人基本涵盖了磁控软体机器人的主要功能类型。每个都有视频演示,说明方法通用性不错。
④ 空心球薄壁结构的制造工艺
空心球(壁厚1.5 mm)用传统方法很难做,因为内部空间封闭。他们用FDM打印水溶性内模,浇注固化后再溶解掉,这个方法简单实用。薄壁结构在磁场下能大幅变形(50%压缩率),说明材料配比确实合适。
⑤ 成本控制
从材料成本(表S1-S5)看,NdFeB磁粉、PDMS、Ecoflex都是市售常规材料,3D打印树脂也不贵。整个过程不需要昂贵的充磁机、激光器或光刻设备。这对想复制或扩展这个工作的实验室来说是个好消息。
04 总结与展望这个工作的核心贡献可以概括为:找到一个好用的配方,发现一个好用的温度,做出六个能动的机器人。材料配比给后续研究提供了一个可参考的起点,120°C这个温度点值得关注——它可能不只是对磁化有效,对其他需要磁颗粒取向的工艺也有参考价值。
六个机器人里,二维变形和四足爬行展示的是基本控制能力,抓取和球形运载更接近实际应用场景。特别是空心球那个,虽然现在还只是演示运水,但如果把尺寸缩小、增加功能,在药物递送、微流体操控这类方向上有潜力。
未来研究将聚焦于以下几个方向:
🔸 更复杂的3D磁畴分布:目前主要靠永久磁铁阵列产生磁场,对磁畴方向的控制还有限。如果能结合电磁线圈或更复杂的磁场发生装置,可以实现更精细的磁畴编程。
🔸 小型化:文中机器人的尺寸在厘米到毫米级。如果能进一步缩小到亚毫米级,可能会碰到磁畴分辨率和材料均匀性的问题。加热法在这个尺度是否依然有效,需要验证。
🔸 多材料集成:现在的机器人是单一复合材料。如果能在不同部位集成不同模量或不同磁响应的材料,可以实现更丰富的功能。
🔸 闭环控制:目前的控制是开环的,靠预设的磁场序列驱动。如果能集成位置或力的感知,实现闭环反馈控制,可以适应更复杂的任务。
🔸 体内应用验证:抓取机器人已经在模拟血液粘度的硅油里测试过了,但真要往体内走,还需要解决生物相容性、长期稳定性、实时成像引导等一系列问题。
🔸 更高效的驱动策略:旋转机器人在5 Hz以上会出现失步现象,说明材料的响应速度有上限。通过优化材料配方或几何设计,有可能提高这个临界频率。
总的来说,这个工作给磁控软体机器人的制造提供了一个新的选项——简单、低成本、效果不差。接下来就看谁能把这个方法用到更酷的地方去了。