英文题目:Bidirectional region expansion guided sampling-based RRT*: achieving high stability and ultra-high planning efficiency
中文题目: 双向区域扩展引导的采样RRT*:实现高稳定性和超高效规划
作者:Jianxing Yang, Kuijie He, Jiahao Wu, Huahan Ruan, Sipei Cai, Yong Zhang
作者单位: 华侨大学机电及自动化学院
期刊:Expert Systems With Applications(IF 7.5 中科院一区,JCR一区)
发表时间:2026年5月10日
链接:
https://doi.org/10.1016/j.eswa.2026.131326
引文格式:Yang J, He K, Wu J, et al. Bidirectional region expansion guided sampling-based RRT*: achieving high stability and ultra-high planning efficiency[J]. Expert Systems With Applications, 2026, 310: 131326.
01 全文速览RRT(快速探索随机树)系列算法是机器人路径规划的经典方法,优点是不需要对环境建模、适用范围广。但它的老毛病也很明显:随机采样太盲目——在全空间里乱撒点,导致搜索效率低、路径质量不稳定、窄通道还容易卡住。
华侨大学团队这次提出的 BR-RRT*(Bidirectional Region Expansion Guided RRT*)把这个问题解决得挺彻底。核心思路听起来很符合直觉:与其在全空间乱找,不如先找出一个“大概率包含最优路径”的区域,然后只在这个区域里采样。
怎么找这个区域?他们用了一个双向区域扩展的策略:从起点和终点同时出发,一层层向外扩展出一个个矩形的“通行区域”,直到两个方向的区域相遇。这个过程中,区域之间有明确的父子关系,形成了一个树状结构。然后采样时,根据当前节点所在的区域,引导采样方向——70%的概率往子区域或父区域走,30%的概率在全区域随机采样,保持探索性。
结果很惊人:在窄通道地图上,RRT*平均要花28.66秒才能找到路径,BR-RRT*只用了0.17秒,时间缩短了99.4%;在迷宫里,RRT*成功率只有77%,BR-RRT*是100%。路径长度也普遍缩短了14%到25%。
核心亮点:
✅区域预构:双向扩展出无障碍连通区域,把采样空间压缩到1%以下
✅引导采样:利用区域间的父子关系指导采样方向,避免盲目探索
✅超高效率:窄通道地图规划时间从28秒降到0.17秒(-99.4%)
✅100%成功率:在窄通道和迷宫里,100次试验全部成功
✅高稳定性:路径长度波动极小,重复使用可靠
✅实车验证:在真实环境中成功导航
02 研究内容🧩问题:RRT的随机采样有多盲目?
RRT的基本流程很简单:随机撒点q,找树上最近的点q,朝q方向走一步生成q,如果路径没撞墙就加入树。重复直到树碰到终点。
这个“随机撒点”是问题所在——它在整个自由空间里均匀采样,而真正有用的区域可能只占1%。剩下的99%的采样都在做无用功,导致:
- 收敛慢(尤其窄通道)
- 路径质量不稳定(每次结果不一样)
- 容易被困在局部
🧠核心思想:先找路,再走路
BR-RRT*的思路很直接:不着急采样,先找出一个“无障碍连通区域”,保证这个区域连接起点和终点,然后只在这个区域里采样。
这个区域怎么找?他们用了一个双向区域扩展的策略:
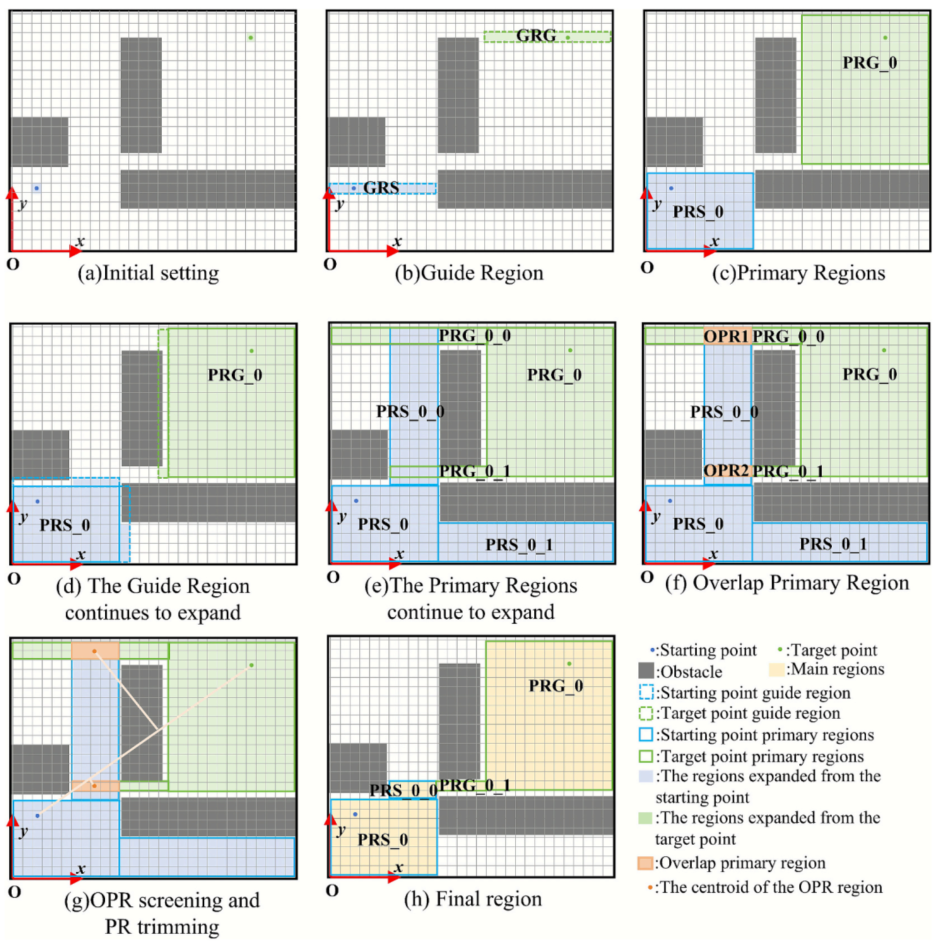
Figure 1:双向区域扩展和简化过程
图2a-h一步步展示了这个过程:
- Step 1(图1a):把环境栅格化,起点S和终点G所在的格子分别标为浅蓝和浅绿。
- Step 2(图1b):从这两个格子开始,沿X轴正负方向一层层扩展,直到碰到障碍或边界,得到“引导区域”(虚线)。
- Step 3(图1c):沿Y轴同样扩展,得到四个边界,围成一个矩形——这是第0代主区域。
- Step 4(图1d-e):继续向外扩展,得到第1代、第2代主区域,并用类似族谱的方式命名(如PRS.0.0、PRG.0.1),记录下父子关系。
- Step 5(图1f):一旦某个起点侧区域和终点侧区域重叠,就找到了一个“重叠主区域”OPR。
- Step 6(图1g-h):选择离起点-终点连线最近的那个OPR,用它连接两侧区域,然后回溯父区域,最后得到完整的无障碍连通区域(图2h中的浅黄色区域)。
这个过程有几个关键点:
1. 严格无障碍:每次扩展只取没有障碍的格子
2. 连通性保证:重叠区域确保两侧连通
3. 层次关系:父子区域关系被记录下来,后面采样要用
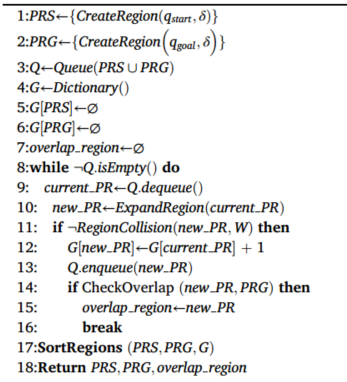
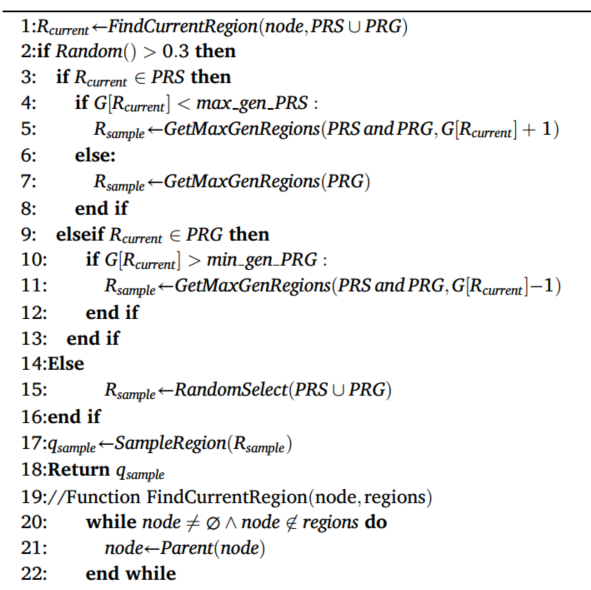
伪代码:双向区域扩展
🎯 采样引导:利用区域关系指导生长
有了这个连通区域,采样就不是乱撒了。他们设计了一个采样引导策略,用到了前面记录的区域父子关系。
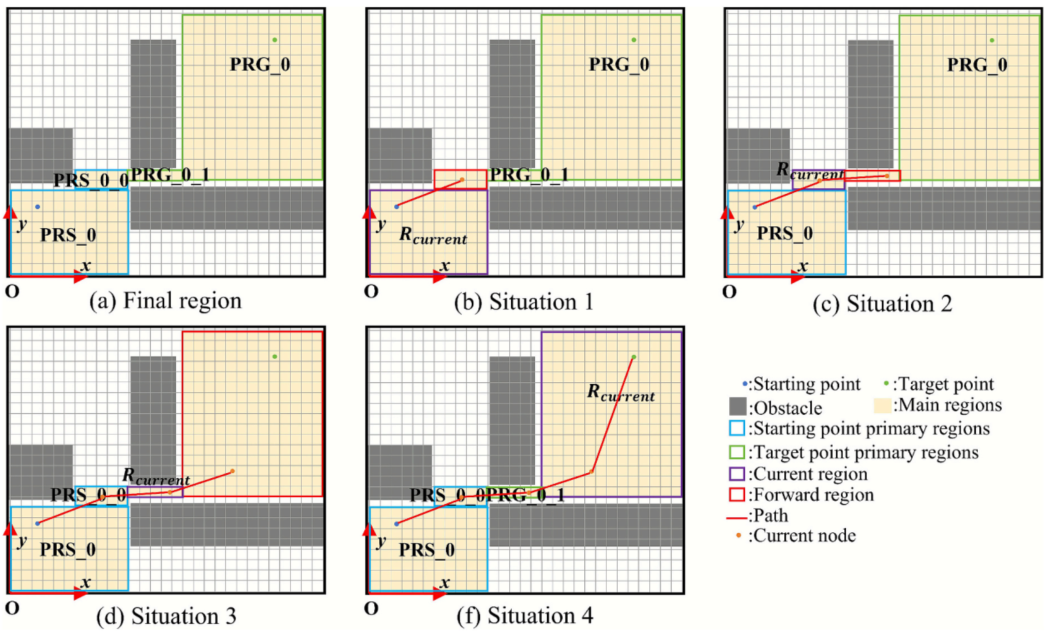
Figure 2:采样逻辑示意图
图2展示了这个逻辑:
- 当前节点在起点侧的第0代区域PRS.0 → 采样点选在它的子区域PRS.0.0(图2b)
- 当前节点在起点侧最深区域PRS.0.0 → 切换到终点侧最深区域PRG.0.1采样(图2c)
- 当前节点在终点侧区域PRG.0.1 → 采样点选在它的父区域PRG.0(图2d)
- 两个树的节点落到同一个区域 → 直接连接(图2f)
为了保留一定的探索性,30%的概率在全连通区域内随机采样。
伪代码:区域引导采样

📏 自适应步长
采样点有了,怎么生成新节点?他们用了自适应步长策略:
- 如果q和q之间没障碍,直接用欧氏距离作为步长,一步到位
- 如果有障碍,根据周围障碍的密集程度动态调整步长
步长计算公式:

其中Os是局部障碍面积占比, O_n是局部障碍数量占比。障碍越密,步长越小,保证安全性。
🧱 三层碰撞检测
为了平衡安全性和计算效率,他们用了三层递进检测:
1. 栅格粗筛(Bresenham算法):快速判断线段是否经过障碍栅格
2. AABB树中筛:用轴对齐包围盒快速排除明显不相交的障碍
3. 精确几何检测:最后做精确的几何相交判断
✂️路径后处理
找到初始路径后,还有两步优化:
1. 全局贪心剪枝:尝试跳过中间节点,直接连接非相邻节点,前提是线段不撞墙且比原路径短
2. 局部优化:把中间节点向它前后节点连线的垂足方向移动,让路径更平滑
🖥️ 仿真实验
他们在四种地图上做了测试:
- Simple:稀疏障碍
- Messy:随机分布的大小障碍
- Narrow:有三个宽度仅10米(机器人宽5米)的窄通道
- Maze:迷宫,有死胡同和急转弯
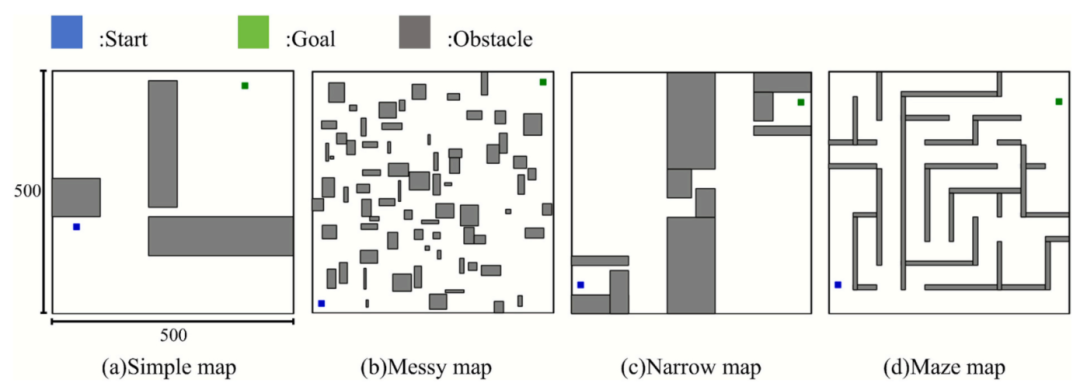
Figure 3:四种测试环境地图
图3展示了这四种地图的布局,灰色是障碍,蓝色和绿色矩形是起点和终点。
Table 1:各算法成功率
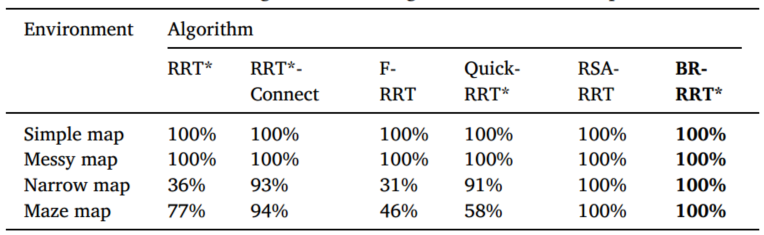
在窄通道和迷宫里,好几个算法成功率惨不忍睹,BR-RRT*依然是100%。
Table 2:各算法规划时间对比

窄通道地图上,RRT*要28.66秒,BR-RRT*只要0.17秒,快了168倍(时间减少99.4%)。迷宫地图上,RRT*要52.78秒,BR-RRT*只要1.28秒,快了41倍。
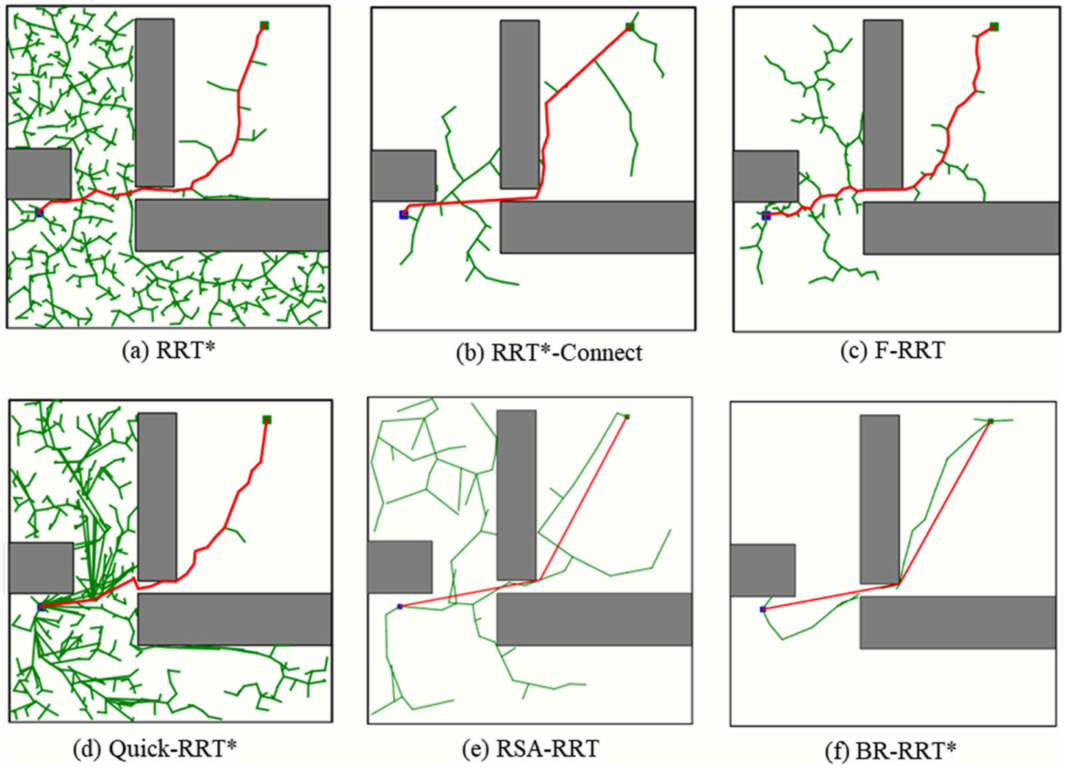
Figure 4. 简单地图模拟结果
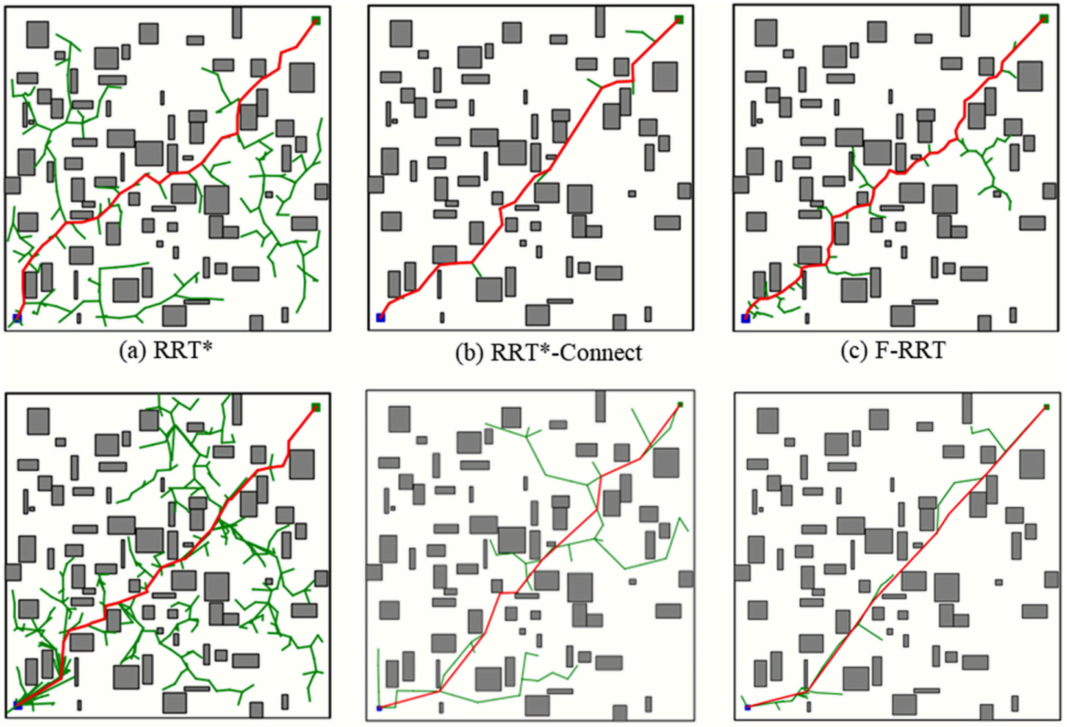
Figure 5. 凌乱地图模拟结果
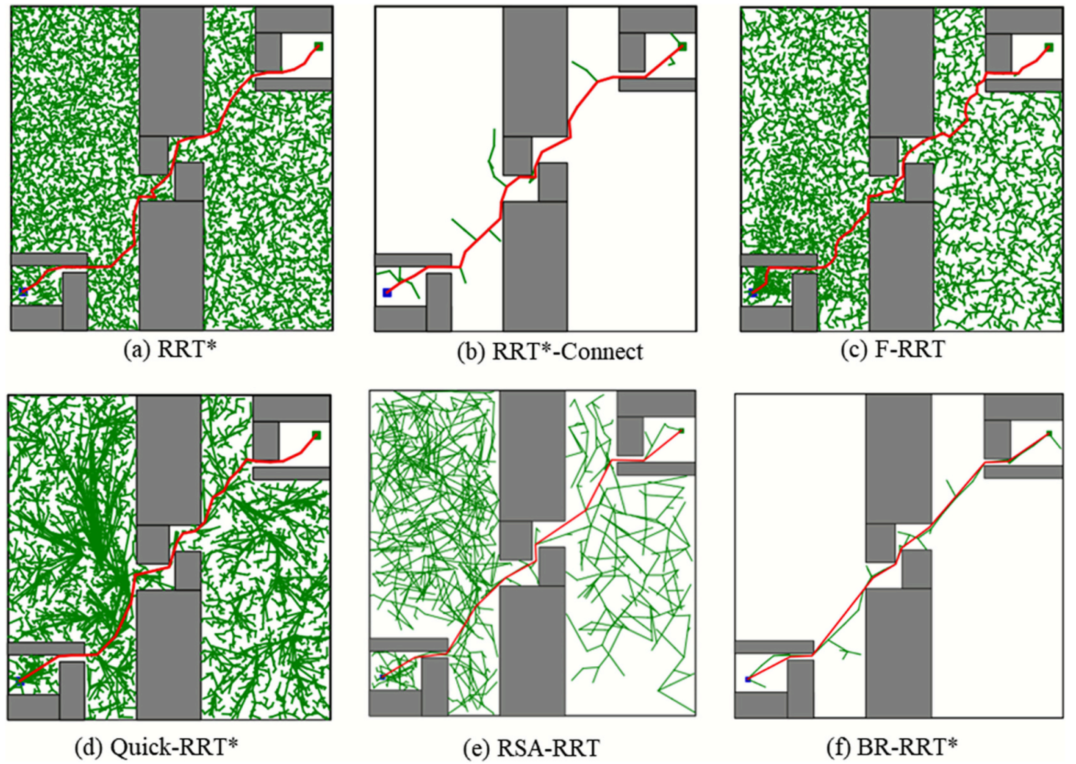
Figure 6:窄地图模拟结果
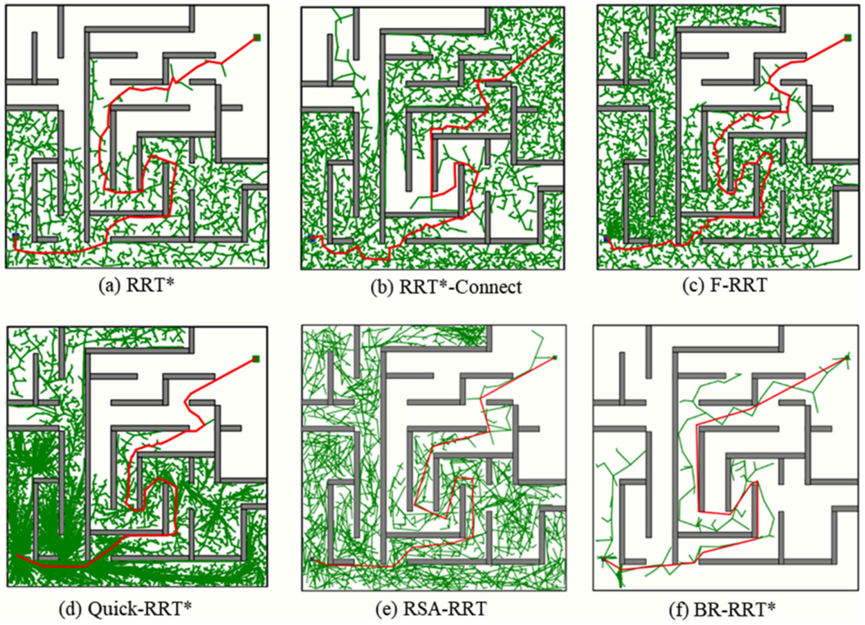
Figure 7:迷宫图模拟结果
图4-7直观展示了各个算法在不同地图上的路径。BR-RRT*的路径更直、转折更少、节点更稀疏。
Table 3:各算法路径长度对比

路径长度上,BR-RRT*也比其他算法短:比RRT*短14%-25%,比RRT-Connect*短13%-23%。
🤖实车实验
最后他们在真实环境里用阿克曼转向的小车做了验证。为了验证所提出的用于移动机器人导航的BR-RRT*算法的实际功效和可靠性,本工作开展了真实世界的实验。如图8所示,移动机器人平台运行在Ubuntu 20.04上,并利用ROS Noetic框架。这种基于ROS的架构提供了对RVIZ等全套软件包的访问,确保高质量环境数据的稳定获取,并为机器人的控制模块提供强大的支持。对于导航,全局规划器是所提出的BR-RRT*算法的简化版本,它保留了核心区域扩展和采样偏差逻辑,并辅以路径平滑步骤。局部规划器采用定时弹性带(TEB)算法。硬件平台为阿克曼转向几何的小型汽车,尺寸为0.28 m × 0.19 m,最大角速度为0.3 rad/s,最大线速度为0.5 m/s。主要计算单元是NVIDIA Jetson Nano 4 GB开发套件。
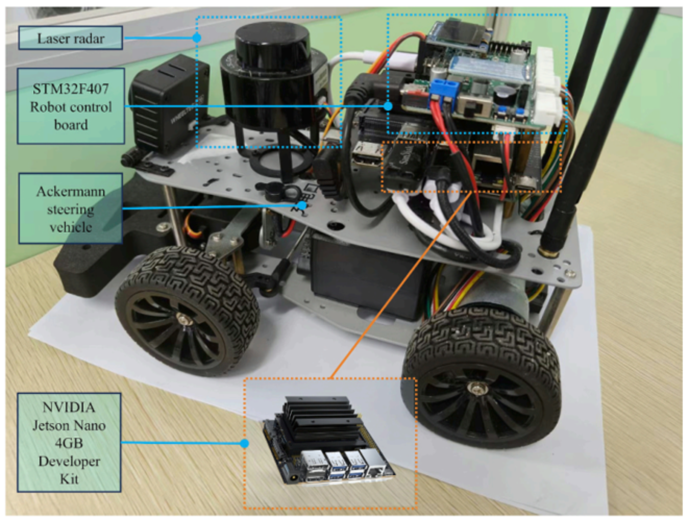
Figure 8:实验平台
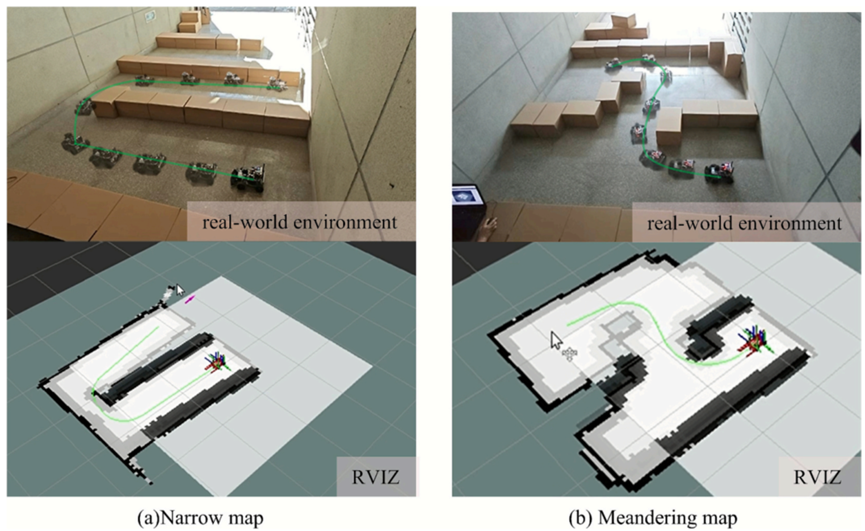
Figure 9:真实环境地图的路径规划
图8是实验平台,图9是两个实景地图:一个窄通道(宽度刚好两倍车宽),一个弯曲路径。小车成功沿着BR-RRT*规划的路径走完全程,无碰撞。
Video S1:实车实验导航全过程
03 创新点①区域预构,而不是边采边找
大多数RRT改进是在采样过程中加启发式,但采样空间还是整个自由空间。BR-RRT*先花一点时间(在复杂地图上也就零点几秒)把有效区域找出来,然后只在这个区域里采样。这种“先看再走”的思路比“边走边看”效率高得多。
②双向扩展+区域层次关系
双向扩展不新鲜,但把扩展出来的区域按代数建立起父子关系,并用这个关系指导采样,这个想法很妙。它相当于给采样过程加了一个拓扑地图:你知道当前在哪个区,就知道下一步该往哪个区走。
③自适应步长策略
公式里用了局部障碍面积比 (Os) 和数量比 (On) 来动态调整步长,而不是简单地“有障碍就缩步长”。这种更精细的调整保证了在开阔地带大步快跑、在复杂地带小心慢行。
④三层碰撞检测
栅格筛、AABB树、精确几何,三层递进。平时用前两层快速排除,只有真正可能撞的时候才做精确计算。这是工程上的优化,不是理论创新,但对实际运行效率提升很大。
⑤稳定性提升
RRT系列一直有个问题:每次跑出来的路径不一样,长度波动大。BR-RRT*因为采样区域固定,路径长度波动极小(Table 3里窄通道地图上最大最小只差16米,RRT*差了191米)。这对工业应用很关键——你不知道这次规划的路径会不会比上次长50%。
04 总结与展望BR-RRT*给人的感觉是:把RRT从“随机搜索”变成了“引导搜索”。它没有改变RRT的树结构,也没有改变渐近最优性,只是加了一个预处理步骤,把采样空间压缩到有效区域,然后在这个区域里用区域关系指导采样。
这个思路的价值在于:它把“找到有效区域”和“在有效区域里找路”两个问题解耦了。前者是拓扑问题,后者是几何问题。拓扑问题用区域扩展解决,几何问题用RRT*解决。各司其职,互不干扰。
未来研究将聚焦于以下几个方向:
🔸高维空间扩展:现在只做了二维,如果扩展到机械臂的C空间或无人机的三维空间,区域扩展的计算量会爆炸。需要用降维投影或分层扩展的方法。
🔸动态环境:如果障碍物移动,之前扩展的区域可能失效。需要做增量式区域更新,只局部更新受影响的部分。
🔸运动学约束:现在的路径是几何的,没考虑车的转弯半径、加速度限制。可以把这些约束加到后处理阶段,或者直接加到规划器里。
🔸栅格分辨率自适应:窄通道里可能需要更细的栅格,开阔地带可以粗一些。动态调整栅格大小可以平衡精度和效率。
🔸与学习方法结合:A*给的初值有时绕远,如果能用学习的方法(比如从历史数据中学习典型路径)直接给一个更好的初值,可以进一步减少迭代次数。
🔸多机协同:如果多台机器人在同一片区域运行,路径规划还要考虑彼此避让。这需要在区域扩展阶段就考虑多机的空间分布。
从仿真到实车,从窄通道到迷宫,BR-RRT*用数据证明了一件事:RRT还能更快,而且可以快两个数量级。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。