论文信息
英文题目:Observer-Based Predefined-Time Adaptive Fuzzy Prescribed Performance Tracking Control for a QUAV
中文题目: 基于观测器的四旋翼无人机预定时间自适应模糊预设性能跟踪控制
作者:Guozeng Cui, Guanchao Zhu, Juping Gu, Qian Ma, Shengyuan Xu
作者单位: 苏州科技大学、南京理工大学
期刊:IEEE Transactions on Fuzzy Systems(IF 11.9中科院一区,JCR一区)
发表时间:2025年2月
链接:https://doi.org/10.1109/TFUZZ.2024.3496562
引文格式:Cui G, Zhu G, Gu J, et al. Observer-Based Predefined-Time Adaptive Fuzzy Prescribed Performance Tracking Control for a QUAV[J]. IEEE Transactions on Fuzzy Systems, 2025, 33(2): 786-796.
01 全文速览四旋翼无人机在军事侦察、农业植保、灾害救援中越来越常见,但这些任务往往要求无人机在时间紧迫的情况下完成精确的轨迹跟踪。传统的控制方法有两个痛点:一是需要知道精确的数学模型,但实际中无人机模型很难精确获取;二是收敛时间依赖于初始状态,没法提前保证在指定时间内完成。
苏州科技大学和南京理工大学团队这次提出的方案同时解决了这两个问题。他们设计了一个模糊状态观测器来估计无人机的不可测状态,同时引入了一个预定时间性能函数——可以事先设定好误差收敛的时间,不管初始状态如何,都能保证在这个时间内误差收敛到指定范围内。
他们还用了命令滤波反步法避免了“复杂性爆炸”,并用分数阶误差补偿机制消除了滤波误差。仿真对比显示,与有限时间动态面控制相比,本文方法能在预定时间2秒内将位置和姿态误差限制在预设边界内,而对比方法在相同时刻还没完成收敛。
核心亮点:
✅预定时间收敛:收敛时间上界可预先设定,与初始状态无关
✅模糊状态观测器:估计不可测状态,无需全部状态可测
✅预设性能:跟踪误差被严格限制在预定性能边界内
✅反步法增强:命令滤波+分数阶补偿,避免“复杂性爆炸”和滤波误差
✅非奇异设计:利用双曲正切函数和洛必达法则,避免奇异性问题
02 研究内容🚁问题:四旋翼无人机跟踪控制的三大挑战
四旋翼无人机(QUAV)的动力学模型是强非线性、高耦合、欠驱动的:
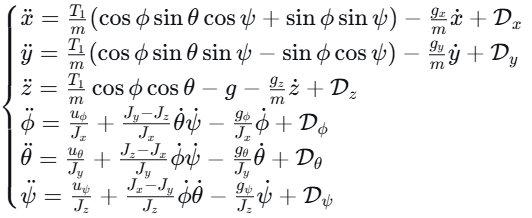
其中

是位置,

是滚转、俯仰、偏航角,

是外部扰动。可以看出,六个自由度之间相互耦合,而且很多状态在实际飞行中难以直接测量。
控制目标:设计输出反馈控制方案,使无人机跟踪期望轨迹

,且满足:
1.跟踪误差在预定时间内收敛
2.误差全程被限制在预设性能边界内
3.系统状态无需全部可测
🧠核心设计1:预定时间性能函数
传统预设性能控制用指数衰减函数,收敛时间趋向无穷大。他们改用了一个预定时间性能函数:

这个函数的巧妙之处在于:
- 初始时刻

,不会导致输入饱和
- 在预定时间

后,
恒定,意味着误差被限制在

内
- 通过调节

和

,可以分别控制收敛时间和稳态精度
跟踪误差需要满足:

为了把这个不等式约束转换成无约束问题,他们引入了误差变换:

🔍核心设计2:模糊状态观测器
由于角速度等状态难以直接测量,他们用模糊逻辑系统来逼近未知非线性项

:

基于此设计模糊状态观测器:
观测误差

满足:

其中

是 Hurwitz 矩阵,保证观测误差有界。
🎯核心设计3:分数阶误差补偿机制
为了避免传统反步法中的“复杂性爆炸”问题,他们用了命令滤波,并引入分数阶误差补偿信号:

其中

是偶数,

是奇数。这个设计能保证补偿误差在预定时间内收敛。
🎮核心设计4:虚拟控制器与实际控制器
虚拟控制信号:

实际控制输入:

自适应更新律:
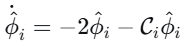
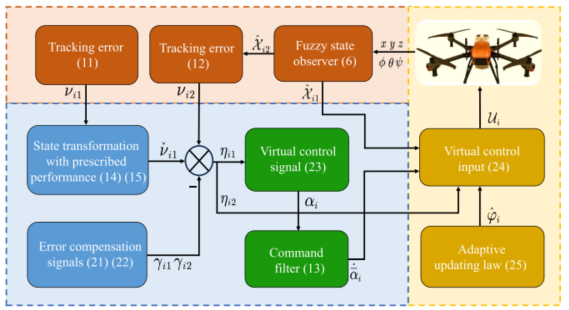
Figure 1:控制算法流程图
📊仿真验证
Figure 2:跟踪误差对比图
图2展示了本文提出的预定时间CFB控制(PTCFB)与有限时间DSC控制(FTDSC)的跟踪误差对比。红色区域是预定时间性能边界
,在

秒后,PTCFB 的误差被严格限制在 [-0.15, 0.15] 内,而 FTDSC 在相同时刻还在收敛过程中。
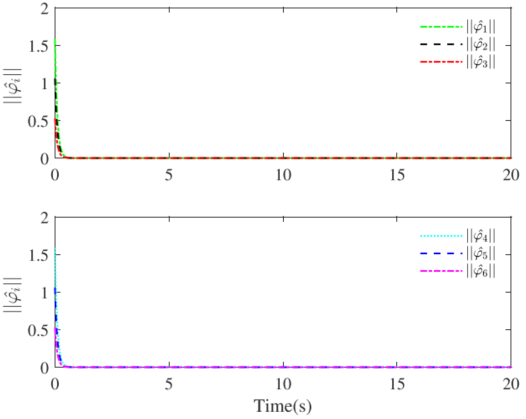
Figure 3:自适应律范数曲线
图3是自适应参数

的曲线,所有参数在初始调整后迅速收敛到稳定值。
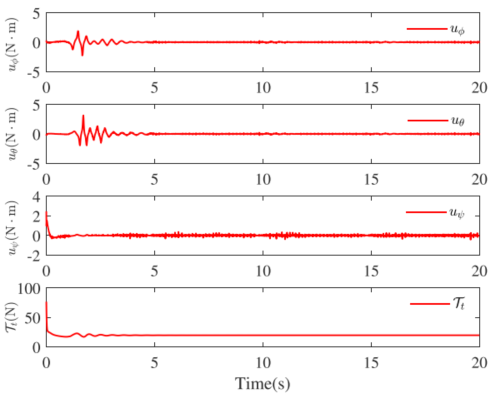
Figure 4:控制力矩和总推力
图4是控制输入
和总推力

。控制信号平滑,没有剧烈抖振。
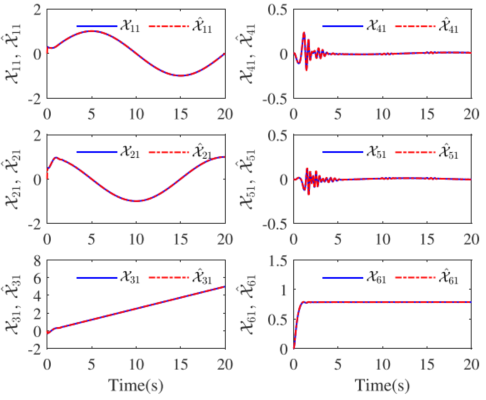
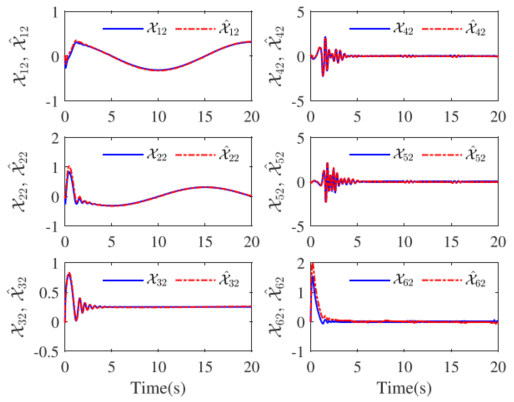
Figure 5-6:状态估计效果图
图5-6展示了位置和速度的估计效果。蓝色是真实值,红色是观测值,两者几乎重合,说明模糊状态观测器工作良好。
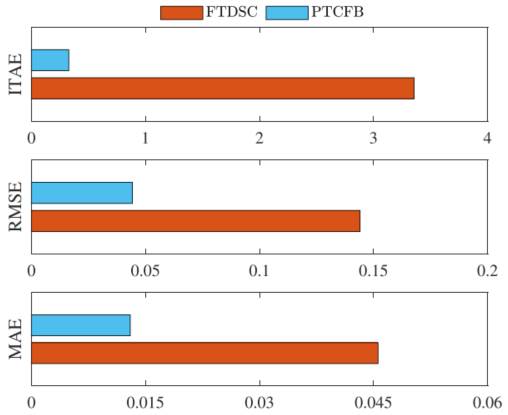
Figure 7:性能指标对比
图7是三个性能指标(ITAE、RMSE、MAE)的对比。PTCFB 在三个指标上都优于 FTDSC,说明控制精度更高。
03 创新点①预定时间收敛与预设性能的结合
传统预设性能控制只能保证误差有界,不能保证在指定时间内完成。固定时间控制能保证收敛时间有界,但这个界依赖于控制参数,不好预先设定。预定时间控制直接把收敛时间Tp作为设计参数,想让它2秒收敛就设2秒,想让它5秒收敛就设5秒,简单直接。
②模糊状态观测器+输出反馈
大部分预定时间控制研究假设状态全可测,这在无人机上不现实——角速度、部分位置信息往往需要观测。他们把模糊逻辑系统和状态观测器结合,用可测的输出量(位置和姿态角)估计不可测的速度量,再基于估计值设计控制器。这是一个完整的“估计-控制”框架。
③分数阶误差补偿机制
命令滤波可以避免反步法中的“复杂性爆炸”,但会产生滤波误差。他们用分数阶补偿信号同时解决两个问题:补偿信号本身在预定时间内收敛,同时抵消滤波误差的影响。这种“分数阶”设计比传统整数阶补偿收敛更快。
④非奇异设计
在滑模控制中,当误差接近零时,

次项会趋于无穷大,产生奇异性问题。他们用双曲正切函数
和洛必达法则,严格证明了控制器在

时不会发散。
⑤性能指标量化对比
他们不只是说“效果好”,而是用了三个量化指标:ITAE(时间乘以绝对误差的积分)、RMSE(均方根误差)、MAE(平均绝对误差)。从图7可以看出,PTCFB 在三项指标上都优于 FTDSC,这种量化对比比单纯看图更有说服力。
04 总结与展望这篇文章给人的感觉是:把一堆高级控制理论工具整合起来,解决了一个实际问题。模糊系统处理模型不确定性,观测器处理不可测状态,预定时间函数处理收敛时间,分数阶补偿处理滤波误差,双曲正切处理奇异性——每个工具用在该用的地方,最后证明整个闭环系统是预定时间稳定的。
从工程角度看,这套方案的价值在于:用户只需要设定好想要的收敛时间 Tp和稳态精度

,控制器就能自动保证在这个时间内把误差压进这个范围。不需要根据初始状态反复调试参数,这在时间紧迫的任务中很实用。
未来研究将聚焦于以下几个方向:
🔸执行器饱和与故障:目前的控制输入理论上可以很大,但实际电机有推力限制。需要把饱和约束考虑到控制器设计中,或者加入抗饱和补偿。
🔸事件触发机制:现在控制器是连续运行的,如果改成事件触发(误差超过阈值才更新控制信号),可以降低通信和计算负担。
🔸多机协同控制:本文只考虑单架无人机。如果要扩展到多机编队,需要处理机间通信、避碰、队形保持等问题,复杂度会高很多。
🔸参数自适应优化:虽然收敛时间可以预设,但控制增益等参数还需要手动调节。如果能用强化学习等方法在线优化这些参数,可以进一步提高适应性。
🔸硬件在环验证:目前结果停留在仿真,下一步可以在真实无人机上跑跑看,特别是验证状态观测器在真实噪声环境下的效果。
🔸更复杂的任务场景:比如在有风扰、障碍物的环境中做避障跟踪,或者执行时间最优的轨迹规划。
从仿真到实飞,这条路还有不少坑要填。但至少,他们证明了“预定时间+预设性能”这个组合是可行的。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。