
英文题目:Arc-heating actuated active-morphing insect robots
中文题目: 电弧加热驱动的主动变形昆虫机器人
作者:Jingyu Che, Xiangyu Yang, Jinzhe Peng, Jingyi Li, Zhiwei Liu, Mingjing Qi(通讯)
作者单位: 北京理工大学
期刊:Nature Communications(IF 15.7中科院一区,JCR一区)
发表时间:2025年3月27日
链接:https://doi.org/10.1038/s41467-025-58258-8
引文格式:Che J, Yang X, Peng J, et al. Arc-heating actuated active-morphing insect robots[J]. Nature Communications, 2025, 16: 2975.
01 全文速览把机器人做小不难,做快也不难,但要让一个毫米级的机器人既能飞快奔跑,又能主动变形钻缝,被踩扁了还能自己复原——这就有点意思了。
北理工这个工作做到了。他们做了一个5毫米长、10毫克重的微型机器人,核心驱动方式挺特别:用电弧加热空气,让薄膜腔体膨胀收缩,像心脏一样跳动。在这个基础上,他们把形状记忆合金做成机器人的“骨架”,利用电弧产生的热量触发骨架变形,实现了主动压扁自己钻窄缝、展开浮板变两栖模式的能力。
更狠的是自恢复:用500克砝码(自重5万倍)压扁,几秒钟恢复如初;成年人一脚踩上去(500万倍自重),松开脚照样爬走。
速度也不含糊:最高跑到83.4倍体长每秒,在同等大小的微型机器人里算第一梯队,跟真实昆虫有一拼。
核心亮点:
- ✅ 极致微小:5毫米长,10毫克重,比蚂蚁还轻
- ✅ 驱动变形一体化:电弧加热同时提供动力和变形能量
- ✅ 主动变形:可压扁33%钻缝,可展开浮板变两栖
- ✅ 自恢复:被500万倍自重压扁,松开后数秒复原
- ✅ 速度惊人:83.4倍体长/秒,同尺寸机器人顶级水平
02 研究内容🤖 机器人设计:电弧加热器+形状记忆合金骨架
图1A-B展示了机器人的结构:核心是一个电弧加热(AH) actuator,用聚酰亚胺薄膜做的内外两个腔体,中间有电极。加上四根镍钛诺超弹性丝做的腿,还有嵌入在腔体中间的镍钛诺形状记忆合金环——这就是机器人的“骨架”。
图1C是驱动原理:在电极上施加千伏级脉冲电压,空气被击穿产生电弧,瞬间加热腔体内的空气。气体膨胀,推动内外腔体相对运动,就像心脏跳动一下。放电结束,弹簧把腔体拉回原位,完成一个周期。频率一高,机器人就跑起来了。
图1D是变形原理:形状记忆合金有个特性——低温时可以随便捏,加热到一定温度(奥氏体转变温度)就会“记起”原来的形状。电弧加热正好提供了这个热量。想让它变形,就加大脉冲参数,温度上来,骨架一收,机器人就压扁了。
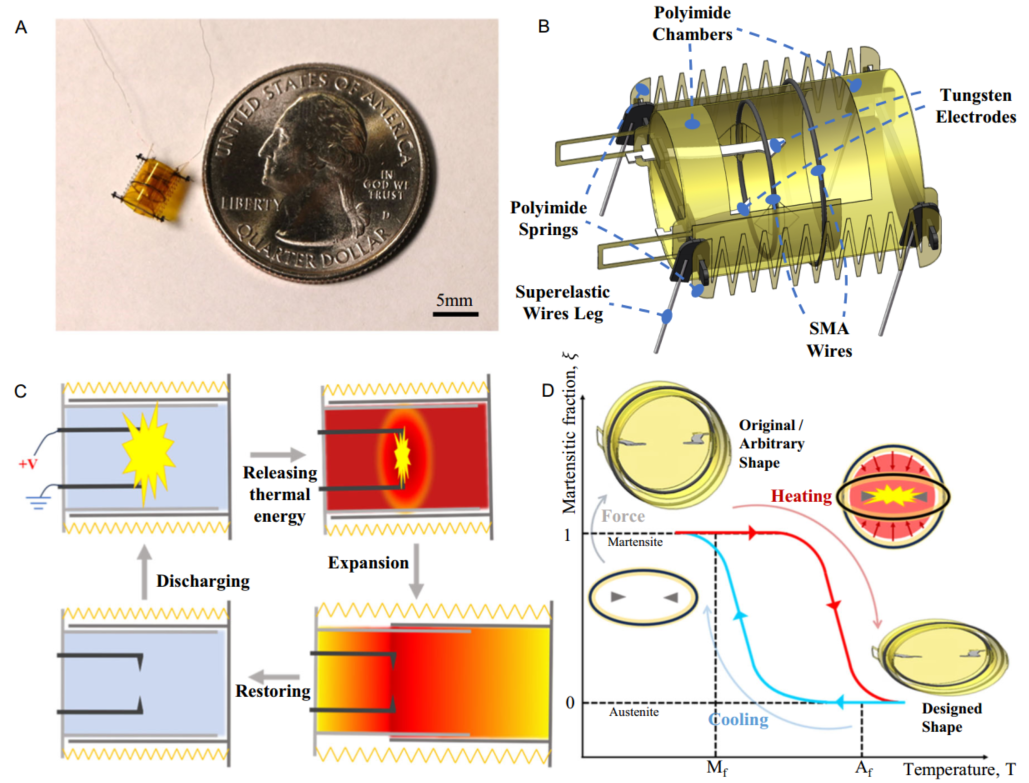
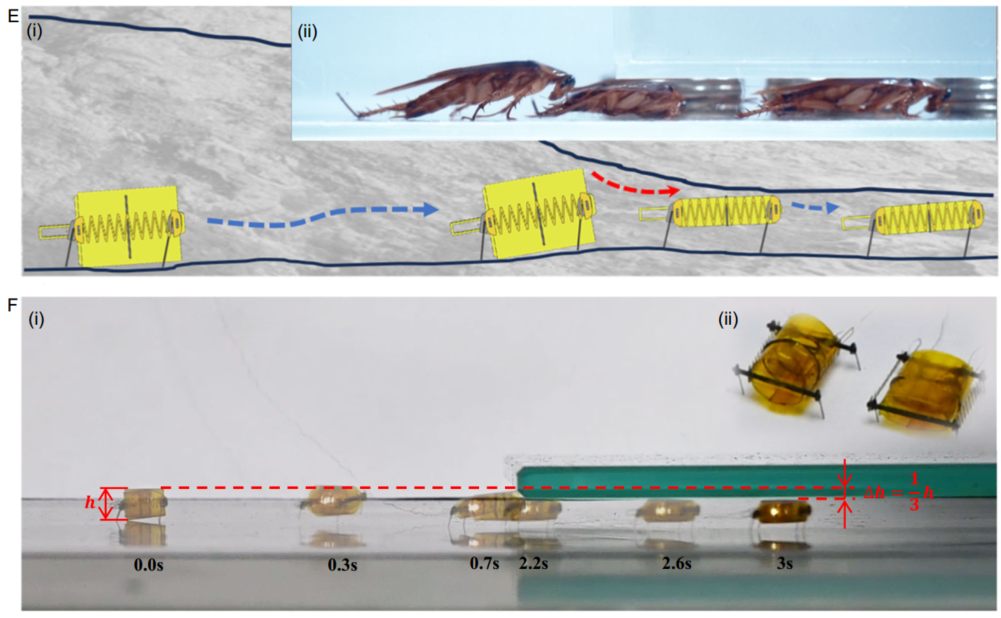
Figure 1:机器人结构图和驱动原理
🦟 主动变形:学蟑螂钻缝,学水黾变船
图1E-F是主动变形的展示:左边是蟑螂钻缝,右边是机器人钻缝。机器人正常高度是h,触发变形后,高度缩了三分之一,2.2秒钻进缝隙。这个功能是靠预先把形状记忆合金训练成扁椭圆形,需要变形时加热它就“记起”扁形状。
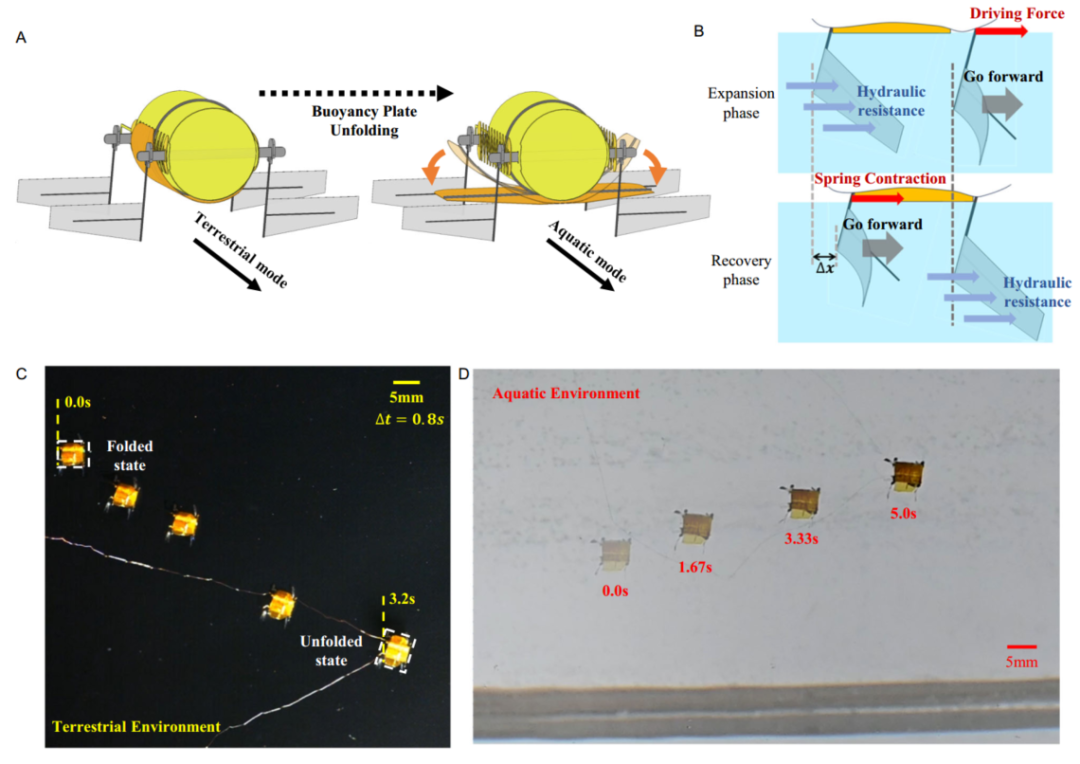
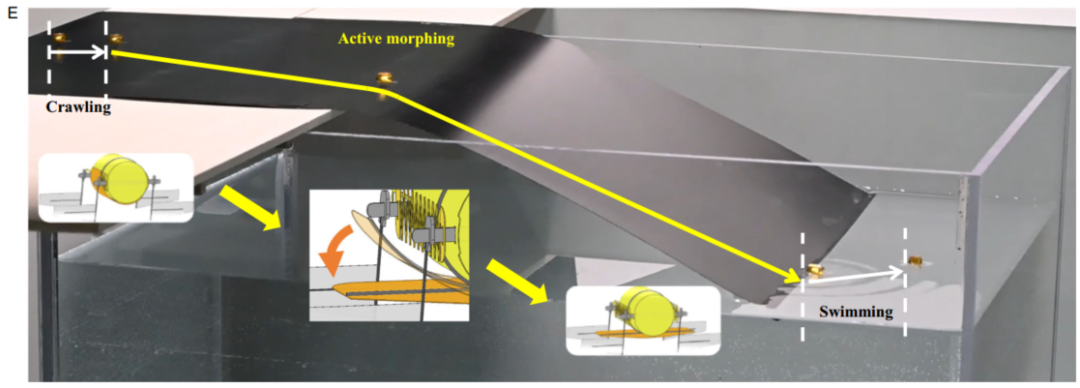
图2 用于适应水生和陆地环境的两栖配置。两栖机器人及其主动变形过程的示意图。两栖机器人在原型的基础上进行了改进,加入了浮板和鳍状肢。 B 水环境中鳍状肢采用的差动推进机制。 C 光学图像显示浮板在进入水中之前在陆地环境中 3.2 秒内展开。 D 机器人在水生环境中以 2 BL/s 相对速度移动的性能。 E Robot在模拟陆地-水生环境中的穿越。最初,机器人以爬行步态前进。当遇到水体时,它会启动主动变形过程,一旦浮力板展开,它就可以过渡到水中并开始游泳。包含向下的斜坡是为了模仿容易遭受涝灾的低洼地区。
图2是两栖版本的变形过程。他们在机器人身上加了一块浮板(橙色)和四个蹼足(灰色)。平时浮板是收起来的(图2C左),需要下水时,加大脉冲参数加热,形状记忆合金骨架展开浮板(图2C右),3.2秒完成变形。图2D显示它在水里能跑到2倍体长每秒。图2E是个连贯场景:陆地上爬,遇到水坑展开浮板,下水继续游。
Movie 9:两栖模式完整流程
⚡ 电弧加热器的特性:温度、振幅、效率
图3A是COMSOL仿真的放电温度分布,电极间最高温度538 K。图3B是红外热像仪实测,核心温度548 K,和仿真对得上。
图3C是不同电极距离和电压下的振幅测试。1.2毫米间隙+6500伏,振幅最大。
图3D是实测位移和理论模型的对比,趋势一致。基于这个模型算出驱动效率29.14%。
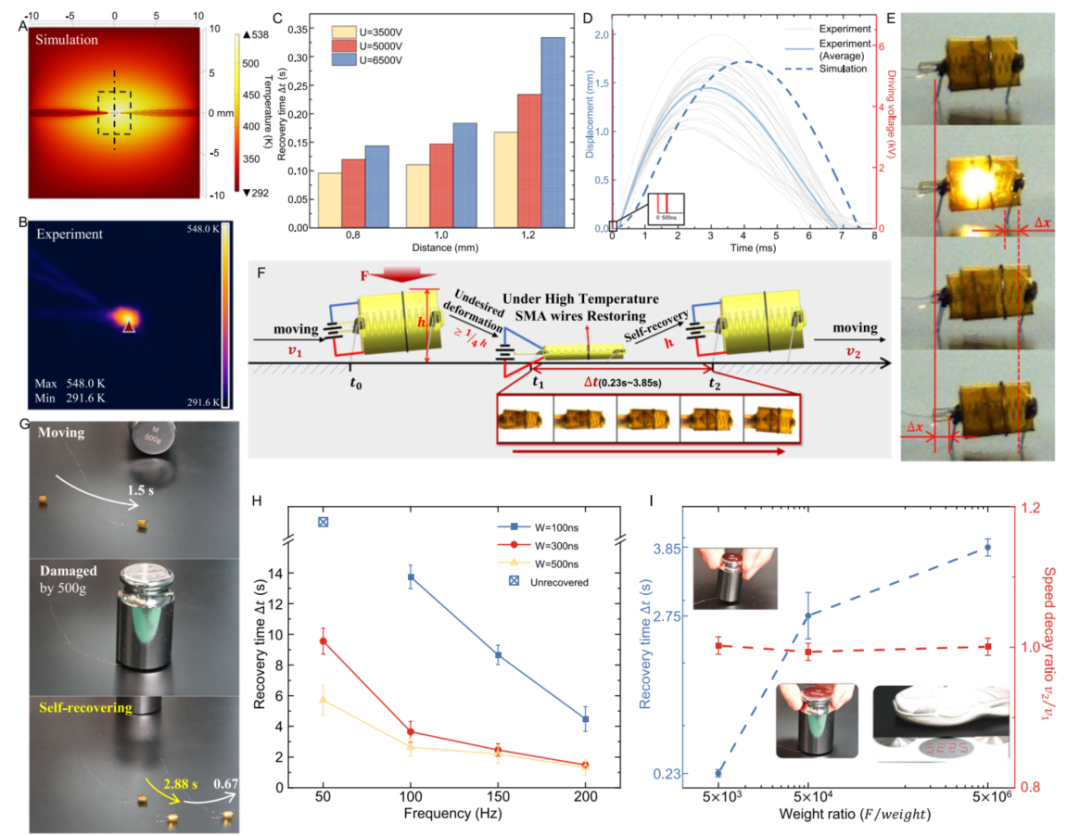
图3 AH 执行器和机器人中的电弧放电、振动和恢复特性。 A 电极放电过程中的模拟空间温度分布,使用 COMSOL 6.0 进行计算,电极距离为 1.2 mm,电压为 6500 V。 B 执行器在运行过程中的热红外成像,保持与模拟相同的电极距离和电压。使用红外温度计 (FLUKE TIS60+) 测量,AH 执行器的核心温度达到 548 K。 C 不同电极距离和电压下执行器相对振幅的实验数据图。D 执行器输出位移的理论(粗虚线)和实验(细灰线)结果比较,粗实线代表多个实验的平均值。 E 光学图像捕捉机器人在一个驱动周期内的爬行和向前运动 (Δx),工作条件为 6500 V,脉冲宽度为 200 ns。 F 运动过程中由于外力 (F) 造成损坏后恢复过程的顺序:初始速度 (v1)、恢复后速度 (v2) 和恢复时间 (Δt)。包括执行器被相当于其重量 (200 g) 20,000 倍的力挤压后在 1.75 秒内恢复的光学图像。 G 从 50,000 倍其重量(500 克)的力造成的损坏中恢复后,机器人仍能保持性能。 H 500 g 重量损坏机器人后的恢复时间与输入脉冲频率和宽度的函数关系。在 50 Hz–100 ns 输入参数下未观察到恢复,所有测试均在 6500 V 电压下进行。误差线表示三个试验的标准偏差。I 不同重量(50 g、500 g、50 kg)损坏后的恢复时间和速度衰减比。速度衰减比定义为恢复后速度相对于损坏前速度,在 6500 V 恒定电压下测量。误差条表示三个试验的标准偏差。
🏃 运动性能:两种步态,83倍体长每秒
图4A展示了速度和脉冲参数的关系。脉宽低于300纳秒,是爬行步态;高于400纳秒,变成跳跃步态——垂直方向的力超过了自重,脚离地了。最高速度83.4倍体长每秒。
图4B是同类微型机器人和昆虫的对比图(数据来自几十篇文献)。红菱形是本文的机器人,落在昆虫分布区(绿色阴影)的下沿,说明速度确实达到了生物水平。
图4C是不同粗糙度表面的速度测试:玻璃(摩擦系数0.3)最快,木头(0.8)最慢。跳跃步态比爬行快,因为离地后滑动摩擦少了。
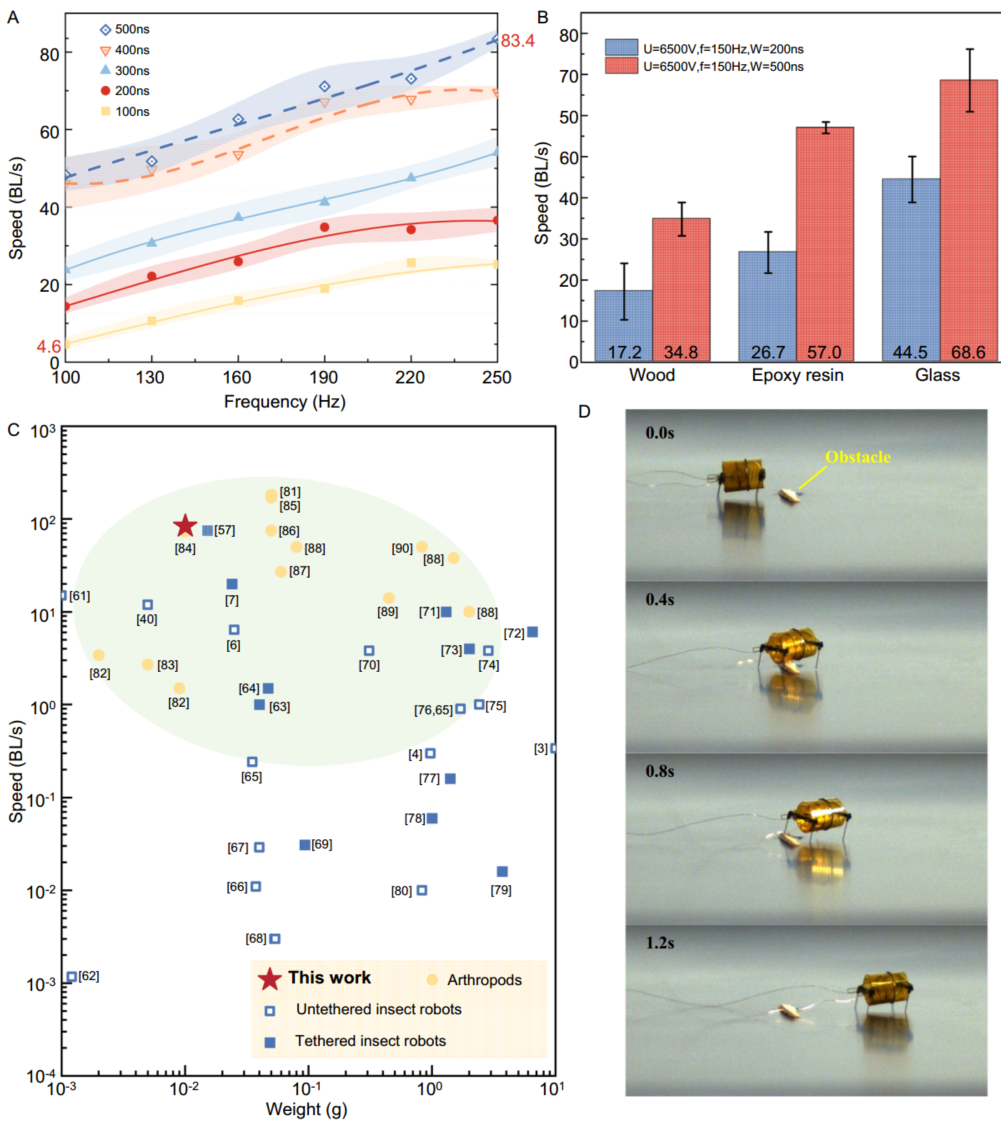
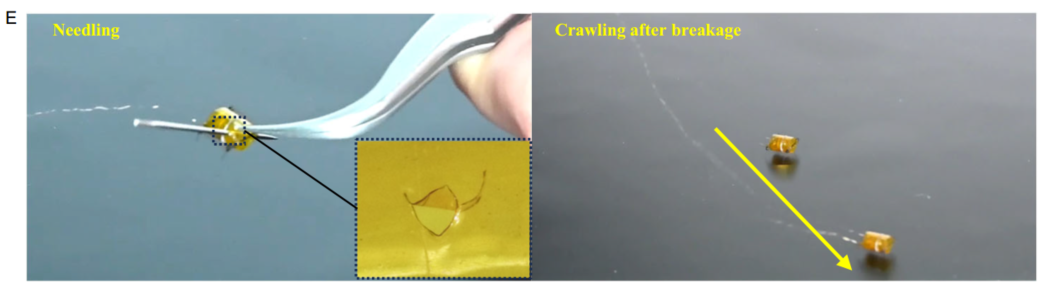
图4 各种条件下的运动性能测试和速度比较。爬行和弹跳步态的速度与输入脉冲频率/宽度之间的关系。实线代表爬行步态数据,而虚线代表在环氧树脂表面测试的弹跳步态数据。误差线表示五次试验的标准偏差。 B 不同类别的速度与体重的比较分析:节肢动物(绿色阴影)、昆虫机器人(10 克以下)。红色钻石代表这项研究的结果。C 不同表面上爬行和弹跳步态的速度测量。误差线表示三个试验的标准偏差。 D 光学图像展示了机器人使用弹跳步态在 1.2 秒内克服障碍。E 说明机器人即使在遭受刺穿损坏后仍能持续快速向前移动。图3D展示越障能力:1.2秒翻过1.5毫米高的障碍(腿长的167%)。图3E更有意思:用针刺穿腔体,机器人照样跑,轨迹都不带歪的。因为泄漏速度赶不上空气膨胀速度,瞬时压力还在。
💪 自恢复:被踩扁了,几秒钟复原
图3F是一串连续图像:机器人正跑着,被200克砝码(自重2万倍)压住,压扁了;1.75秒后,自己恢复原状,继续跑。
图3G更狠:500克砝码(5万倍自重)压完,恢复后速度几乎没掉。
图3H是恢复时间与脉冲参数的关系:脉宽越大、频率越高,恢复越快。100纳秒+50赫兹时,能量不够,恢复不了。
图3I是三种负载下的恢复时间和速度衰减比:50克、500克、52公斤(成年人踩上去,500万倍自重)。恢复时间随负载增加而变长,但速度衰减比基本维持在1.0——意思就是,恢复之后跑得和原来一样快。
03 创新点
① 驱动与变形的一体化设计
大多数可变形的机器人,驱动和变形是两套系统——电机管动,形状记忆合金管变。这个工作的巧妙之处在于:电弧加热同时提供动能和热能。一次放电,既让腔体膨胀推动机器人前进,又让形状记忆合金受热触发变形。没有多余结构,没有额外能耗。
② 电弧加热驱动在毫米尺度的极致利用
电弧加热不是什么新技术,但用在毫米级机器人上很少见。关键原因是:这个尺度的能量需求和电弧的输出刚好匹配。传统内燃机或爆炸驱动在这个尺度做不了(燃料储存、燃烧控制太难),电机和减速器又太重。电弧加热直接在腔体里放电,结构简单,能量密度高,刚好适合毫米级。
③ 主动变形的编程能力
通过训练形状记忆合金的不同形状(圆环、扁椭圆、浮板骨架),可以预设多种变形模式。而且变形与否、变形速度,都可以通过脉冲参数控制(图3H)。这意味着机器人可以按需变形——需要钻缝就压扁,需要下水就展开,平时保持原状不影响运动。
④ 极端的自恢复能力
500万倍自重的负载压扁后恢复如初,这个数据很夸张。靠的是形状记忆合金的单向记忆效应:不管怎么压扁,只要温度超过转变点,它就“记起”训练时的形状。而且恢复后性能不衰减(图3I的速度衰减比≈1),说明材料抗疲劳性不错。
⑤ 速度与功能的平衡
83.4倍体长每秒的速度,在同尺寸机器人里是第一梯队(图4B)。更难的是,在保持这个速度的同时,还集成了主动变形和自恢复功能。很多机器人为了加功能牺牲速度,这个工作没走那条路。
04 总结与展望这个工作给人的感觉是:把两个已有的技术——电弧加热驱动和形状记忆合金——用一种很巧妙的方式结合在一起。不是简单的1+1,而是让电弧的热量同时为两个系统服务,实现了驱动和变形的耦合。
从工程角度看,这种设计的价值在于:用最简单的结构(薄膜腔体+合金丝)实现了最复杂的功能(快速运动+主动变形+自恢复)。没有传感器、没有控制器、没有反馈,纯靠物理和材料特性。对于毫米级机器人来说,这种“减法”思路很重要——因为没地方放那些复杂的电子系统。
未来研究将聚焦于以下几个方向:
🔸 转向能力:现在的机器人只能直走。如果能在电极布局、腔体形状、或者腿的设计上做文章,实现可控转向,应用场景会大很多。
🔸 无缆化:目前还是拖着细电线跑的。要实现真正的自主,需要集成微电池或无线能量接收(激光、射频)。难点在于重量——现有电池对10毫克级的机器人来说太重了。可能需要外部供能,或者让大机器人带小机器人到任务区。
🔸 双向形状记忆:现在用的是单向记忆——加热变形后,冷却不会自动回去。如果能用双向记忆材料,可以实现可逆变形(比如浮板展开后能自动收回去),重用性更好。
🔸 更复杂的变形模式:目前实现了压扁和展开两种。理论上可以通过训练多段合金丝,实现更复杂的形变(比如弯曲、扭转),适应更多场景。
🔸 耐久性优化:虽然自恢复能力强,但电弧放电和合金丝反复热循环会不会导致材料疲劳?长期可靠性需要更多测试。
🔸 集群应用:如果成本能降下来,这种小东西可以撒一把出去,在地震废墟、管道、丛林里协同探索。5毫米的尺寸,比蟑螂还小,能去人去不了的地方。
从“被踩扁还能爬起来”这个点,可以看出这个机器人的韧性。下一步,是让它在更复杂的环境里,也能这么抗造。