英文题目:Parthenocissus-inspired soft climbing robots
中文题目: 爬山虎启发的软体攀爬机器人
作者:Kecheng Qin, Wei Tang, Huaizhi Zong, Xinyu Guo, Huxiu Xu, Yiding Zhong, Yonghao Wang, Qincheng Sheng, Huayong Yang, Jun Zou(通讯)
作者单位: 浙江大学、南方科技大学
期刊:Science Advances(IF 12.5中科院一区,JCR一区)
发表时间:2025年3月26日
链接:https://www.science.org/doi/10.1126/sciadv.adt9284
引文格式:Qin K, Tang W, Zong H, et al. Parthenocissus-inspired soft climbing robots[J]. Science Advances, 2025, 11(13): eadt9284.
01 全文速览攀爬机器人不是新鲜事,但大多数都有个共同的软肋:只能在特定材料(比如铁磁性表面)或特定结构(比如平整墙面)上爬。一旦遇到材料混杂、表面不连续的环境——比如建筑工地、矿井、生产车间里的脚手架或镂空格栅——传统的攀爬机器人就抓瞎了。
浙大和南科大团队从爬山虎身上找到了解决方案。他们发现,爬山虎之所以能在各种复杂表面上攀爬,靠的是一种“生长-攀爬耦合”的策略:一边生长,一边长出吸盘固定自己,再继续向上。他们把这种机制复现到了机器人上。
这个软体攀爬机器人直径5.8厘米,长度可以根据任务定制。它的“吸盘”是一层带微结构的生物膜,像爬山虎的吸盘一样能产生范德华力和负压吸附。它的“弯曲”靠的是形状记忆合金弹簧,通电收缩,最大能弯80度。最特别的是,任务完成后它还能通过电机反向卷绕,把伸出去的“身体”完整收回来,不留下任何东西。
他们在各种复杂表面上做了验证:木材、陶瓷、白墙、金属——都能爬;格栅、管道、直角拐角——也能过。结合无人机搭载,还能实现三维空间的侦察任务。
核心亮点:
✅生长-攀爬耦合:像爬山虎一样,一边生长一边固定自己,突破不连续表面
✅微结构生物膜:仿生吸盘,对多种表面有7-10 kPa的吸附强度,可重复使用、无残留
✅SMA弯曲驱动:最大弯曲80度,响应时间1.5秒,轻量可控
✅可收缩:任务完成后通过电机反向卷绕完整收回,不遗留任何部件
✅环境适应性:能在木材、陶瓷、白墙、金属、格栅、管道、拐角等多种表面攀爬
✅无人机协同:搭载在无人机上,实现飞行+攀爬的立体侦察
02 研究内容🌿 灵感来源:爬山虎的生长-攀爬机制
爬山虎攀爬的过程可以概括为:生长、长出吸盘、固定、再生长。细胞膨压提供驱动力,营养物质输送到尖端合成细胞壁,吸盘上密密麻麻的微观结构让它可以牢牢吸附在任何表面上。
关键点在于:已生长的部分被吸盘牢牢固定,不会影响后续的生长和弯曲。这个“固定-生长”解耦的机制,正是现有生长式机器人欠缺的。
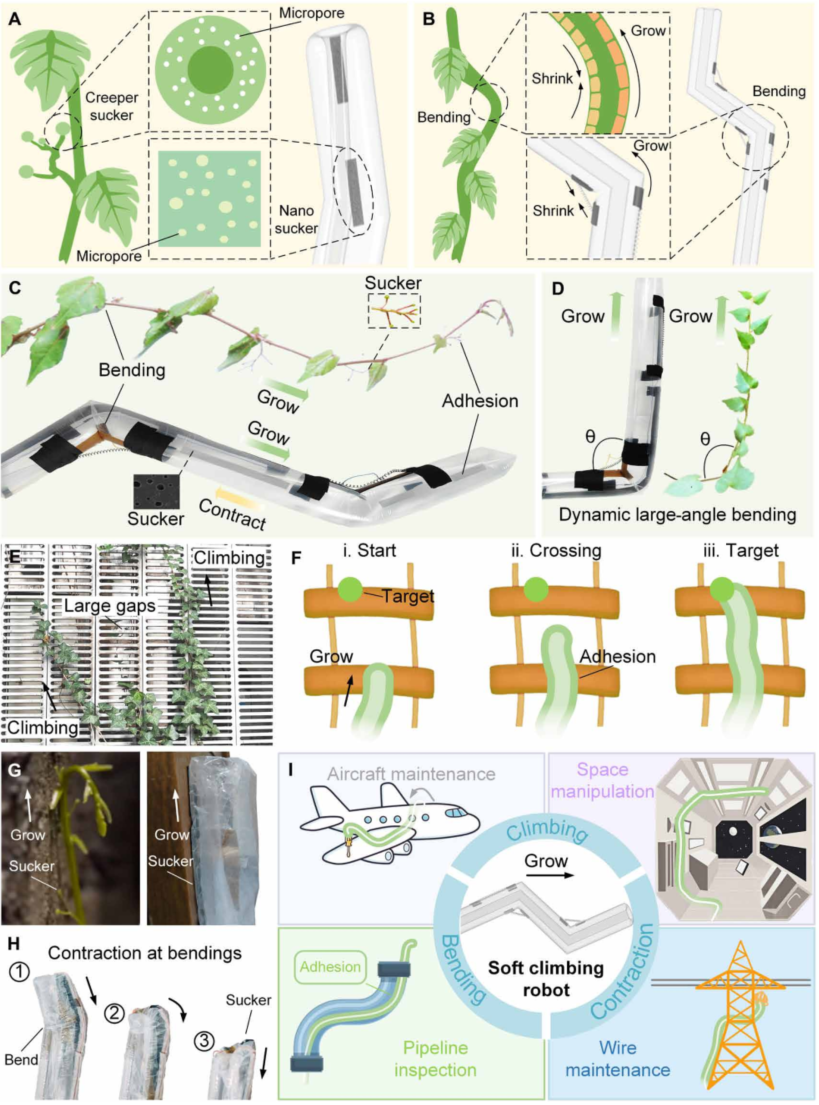
图 1. 受爬山虎启发的软体攀爬机器人的概念。 (A) 爬山虎的吸盘和机器人。吸盘上有微孔。 (B) 爬山虎和机器人的弯曲。一侧收缩会导致弯曲。 (C 和 D) 动态大角度弯曲。爬山虎和机器人的弯曲角度可大可小。 (E) 攀缘植物在不连续的表面上攀爬。不连续表面存在较大间隙(F)软体爬行机器人在不连续表面攀爬。机器人越过大路,到达目标。 (G) 爬山虎的生长和攀爬以及软体攀爬机器人。 (H) 软体攀爬机器人的收缩。弯曲也可以收缩。 (一)软体攀爬机器人的应用。
🤖生长-攀爬机制在机器人上的实现
他们把爬山虎的机制映射到了机器人上:
-驱动力:细胞膨压 → 气动压力
-材料输送:营养物质输送 → 生长材料外翻
-吸附:吸盘 → 微结构生物膜
-弯曲:胶质纤维收缩 → SMA弹簧收缩
图1C是机器人的结构示意图,1D是实物照片。机器人主体是0.05毫米厚的PE膜,直径5.8厘米。微结构生物膜贴在一侧,另一侧贴毛毡防止内部粘连。SMA弹簧固定在机器人外侧,间隔大于2厘米以避免影响生长。
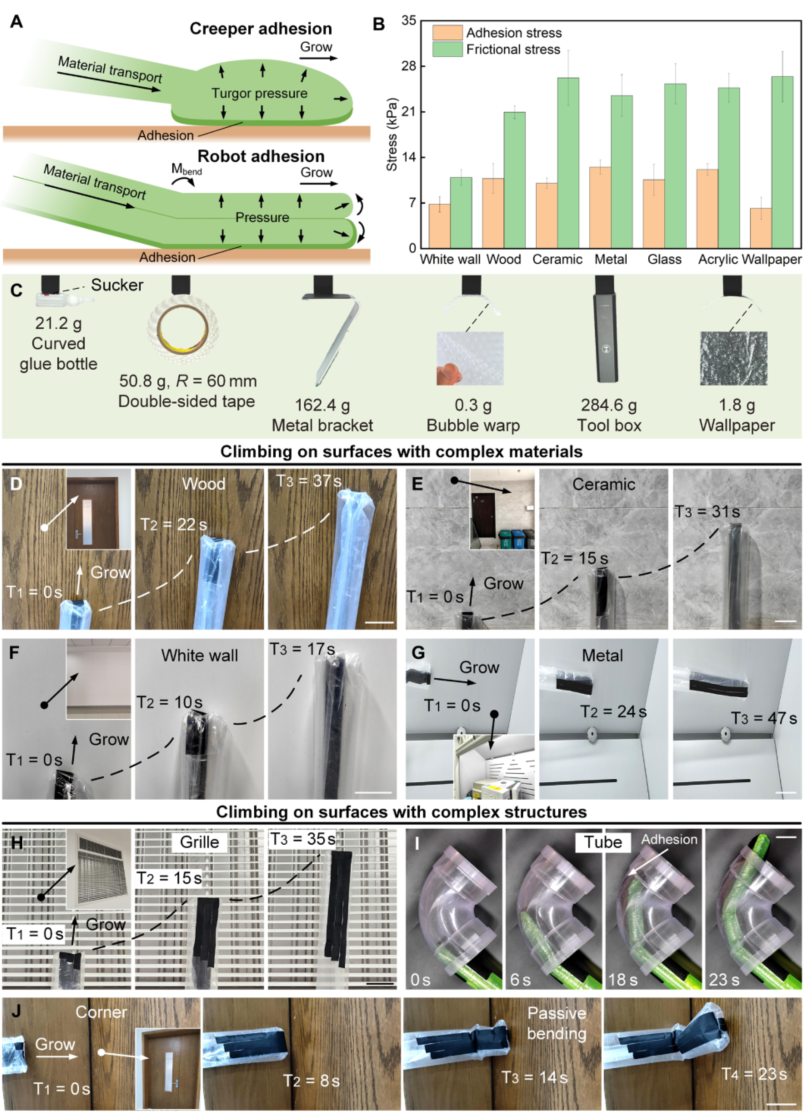
图2 软体攀爬机器人的生长攀爬机构。 (A)生长攀爬机制的原理,包括驱动力、物质传输和粘附。 (B) 微结构生物膜的粘附应力和摩擦应力。 (C) 展示微结构生物膜对不同重量、尺寸和材料的各种物体的粘附力。 (D到G)软体攀爬机器人在不同材料的表面上攀爬,包括木材、陶瓷、白墙和金属(视频S1)。 (H到J)软体攀爬机器人在结构复杂的表面上攀爬,包括格栅、管子和拐角(视频S2)。比例尺,5 厘米。
图2A把生长-攀爬机制拆解成三个要素:驱动力、材料输送、吸附。每个要素都有对应的生物学原型和工程实现。
他们还建立了一个生长模型:

这个式子把驱动压力分解成三部分:细胞壁扩展、路径损耗、尖端剥离力。右边的最后一项就是剥离力——为了减小这个力,他们在生物膜的另一侧贴了低表面能的尼龙材料。
吸附力模型:

范德华力 + 负压差,两者共同作用。
🧪吸附性能测试
图2B是微结构生物膜在7种常见表面的吸附强度测试。光滑表面(陶瓷、金属、玻璃、亚克力)上能达到10 kPa,粗糙表面(白墙、木材)上也能到7 kPa。摩擦强度更高,陶瓷表面能达到26.2 kPa。
图2C展示了生物膜对各种物体的吸附能力:工具箱(284.6克)、金属支架(162.4克)、弧形胶水瓶(21.2克)、双面胶卷(50.8克)、气泡膜(0.3克)、墙纸(1.8克)。不管形状、重量、材质,都能吸住。
🧗攀爬性能演示
图2D-G是机器人在木材、陶瓷、白墙、金属四种材料表面攀爬的连续截图。都能爬,证明生物膜的适应性不错。
图2H是爬格栅(不连续表面),图2I是爬管道,图2J是爬90度拐角。都顺利通过。
🔄生长-弯曲机制
图3A是爬山虎的铰链式弯曲,弯曲位置固定不变。图3B是内外侧生长速率对比,内侧慢、外侧快,所以产生弯曲。图3C-D是机器人的弯曲原理:SMA弹簧通电收缩,产生褶皱,导致一侧长度变短,整体弯曲。已经生长并弯曲的部分被吸盘固定,不会影响后续动作。
图3E是SMA弹簧的形变-温度曲线:50度开始相变,68度完全收缩,最大收缩量13.5厘米。图3F-G是不同压力下的弯曲角度和响应时间:4.2 kPa下能弯80度(9V电压),响应时间1.5秒。
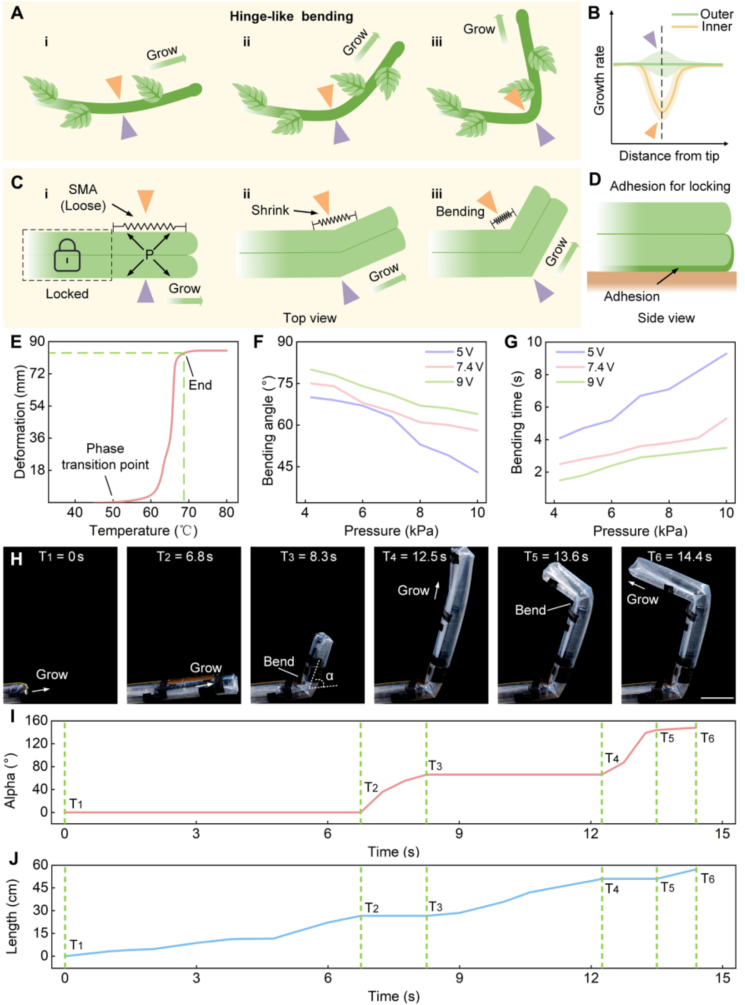

图3 软体攀爬机器人的生长弯曲机构。 (A)爬山虎的铰链状弯曲。弯曲位置不随时间变化。(B) 弯曲内侧和外侧的增长率。内部生长速率低于外部生长速率(C 和 D)。增长弯曲机构的原理。已经长大和弯曲的部分被锁定。 (E) SMA 弹簧的变形测试。 (F) 不同压力下机器人弯曲角度的测试。 (G) 机器人在不同压力下的弯曲时间测试。 (H 到 J) 软体攀爬机器人的连续弯曲。机器人经历两次弯曲,记录角度α和增长长度。 α 定义为机器人头轴与水平线之间的角度(视频3)。 (K) 软体攀爬机器人的 3D 生长(视频 S4)。比例尺,10 厘米。
图3H-J是一次连续两次弯曲的过程,每次弯曲后都能继续生长。图3K是经过三次弯曲实现的三维生长轨迹。
📦收缩机制
图4A是收缩时的受力分析:内部材料产生的拉力F可以分解为轴向力Fa和径向力Fr。轴向力负责把机器人往回拉,径向力会把机器人压向侧壁。要能顺利收缩,需要满足:
径向力小于吸附力,机器人就不会侧弯打结。
他们用Kendall模型来描述生物膜的剥离行为:
剥离角θ越大,剥离力越小。机器人的剥离角接近180度。
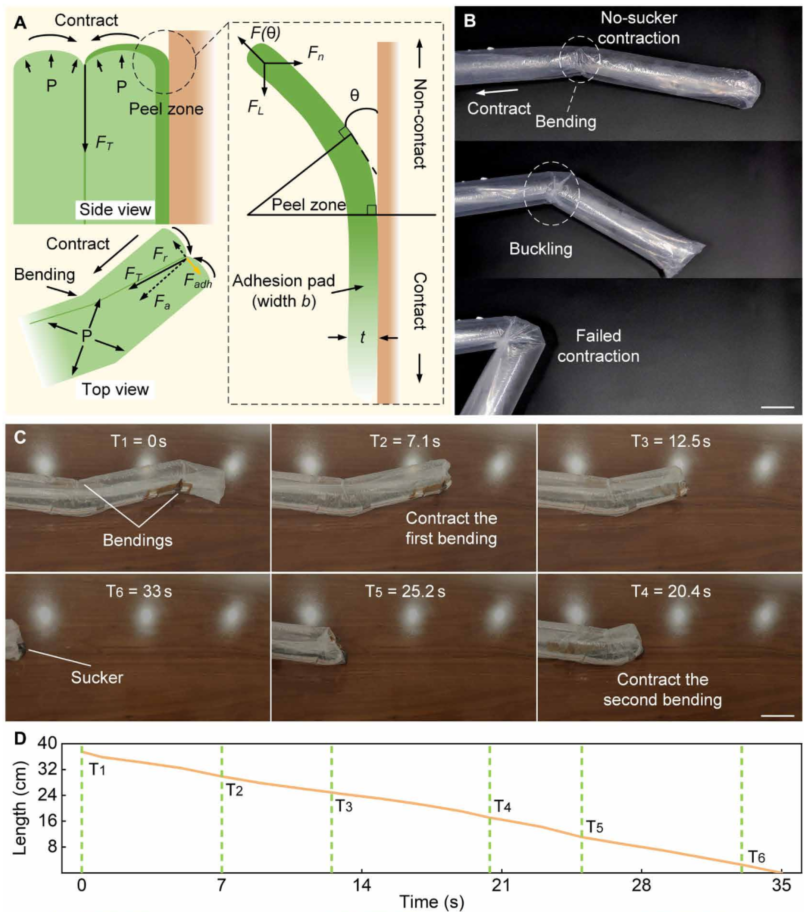
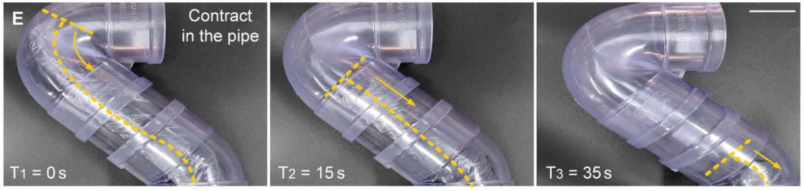
图4.软体攀爬机器人的收缩机构。 (A)收缩机制的原理。机器人的收缩可以看作是一个剥离过程。 (B) 没有额外收缩装置的生长机器人将会弯曲。 (C和D)连续弯曲软爬机器人的收缩过程(视频S5)。收缩的长度随时间线性变化。 (E) 连续弯曲软爬机器人在管道内的收缩过程。机器人沿着弯曲的管壁进行剥皮。比例尺,5 厘米。
图4D是机器人在平面上收缩的过程,经过两个弯曲点,生物膜像胶带一样被撕开。图4E是在弯曲管道内收缩的过程。
👁️视觉检测应用
他们在机器人头部装了摄像头,用YOLOv5实时检测目标。图5A是软硬件框架,图5B是识别拱门并穿过的过程,图5C是目标水平距离随生长长度的变化曲线——控制系统根据这个距离决定左转、直行还是右转。
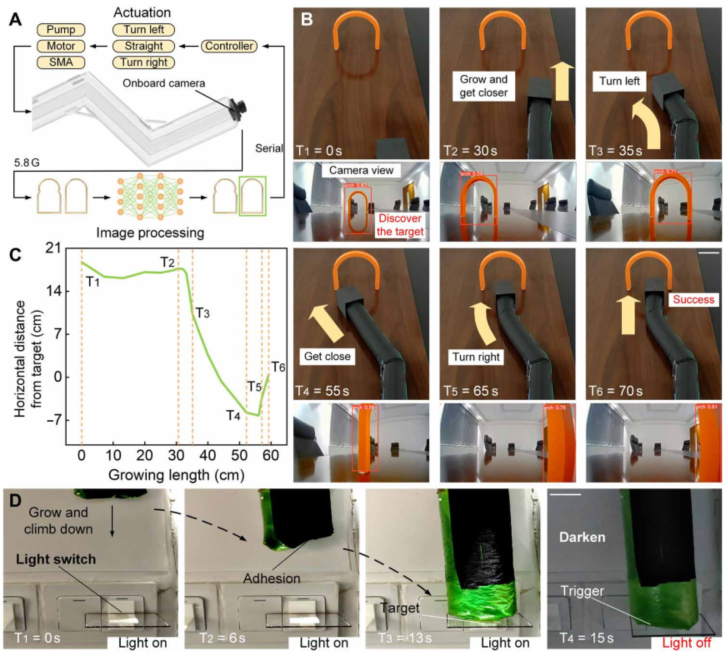
图 5. 用于目视检查的软体攀爬机器人。 (A)软体攀爬机器人视觉检测的软硬件框架,包括驱动和图像处理。 (B) 软体攀爬机器人视觉识别并穿过拱形门。从摄像机的视角可以识别拱门(视频7)。比例尺,5 厘米。(C) 生长过程中距目标的水平距离。 (D) 软体攀爬机器人关灯。机器人可以通过成长的力量完成操控任务。比例尺,2.5 厘米。
图5D是机器人利用生长的冲击力关灯的连续截图。冲击力在10 kPa下能达到10.1牛。
🚁无人机协同应用
他们把生长模块集成到一个四旋翼无人机上(图6A),模块重284克,由无人机供电和控制。图6B是协同作业流程:无人机飞到脚手架某一层,停靠;机器人生长出来,爬上脚手架,穿过缝隙,到达目标点。图6C是机器人在空中生长和弯曲的演示。图6D是模拟建筑工地的微型场景,机器人从无人机平台出发,两次弯曲后看到缝隙里的目标。
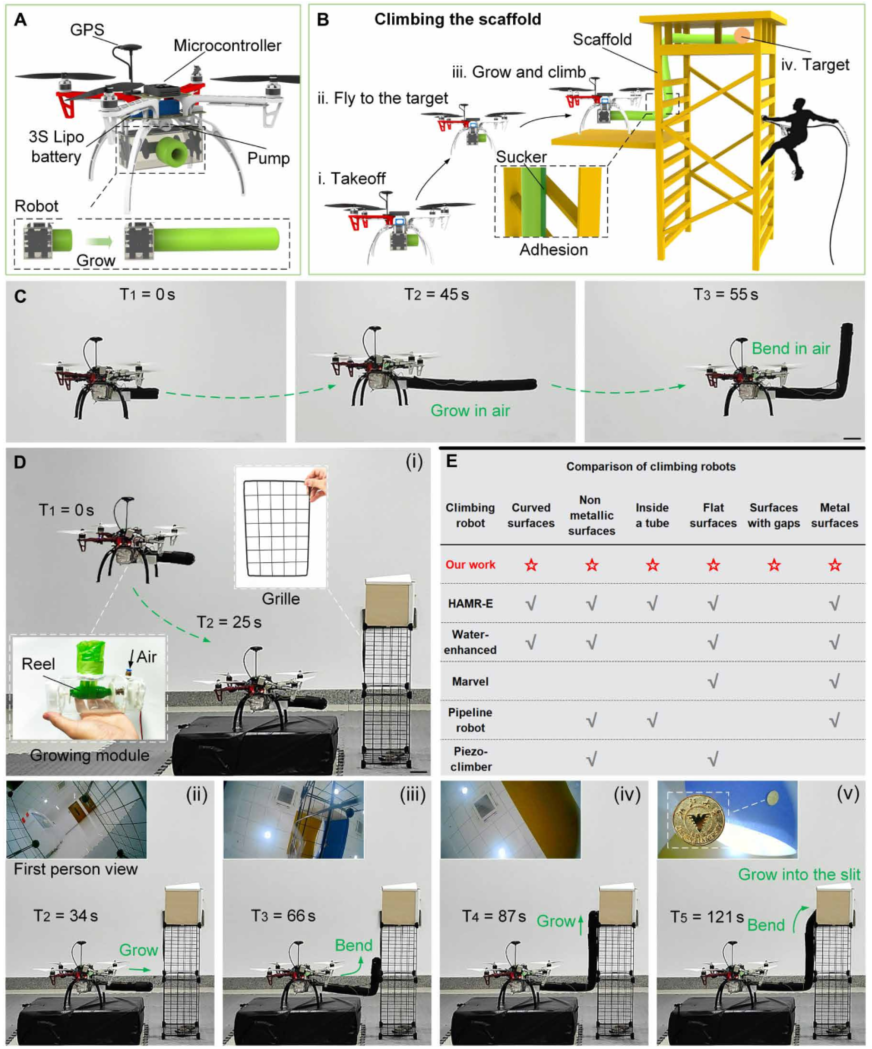
图 6. 软体攀爬机器人与无人机结合用于建筑工地检查。 (A) 携带生长模块的无人机,该模块具有便携性和集成性。(B) 无人机与软体攀爬机器人结合的想象操作场景,以降低人类风险。 (C) 软体攀爬机器人的空中生长(视频S8)。(D) 软体攀爬机器人和无人机相结合,用于 3D 探索。第一人称视角来自软体攀爬机器人前端的摄像机(视频S9)。(E) 与其他攀爬机器人的比较。比例尺,10 厘米。
图6E用一张二维图对比了各类攀爬机器人的表面适应性。本文的机器人覆盖的区域最广,尤其是在“不连续表面”这个维度上独树一帜。
03 创新点①生长-攀爬耦合机制
这是全文最核心的概念。以往的攀爬机器人要么是“爬”不“长”,要么是“长”不“爬”。他们把生长和攀爬耦合起来:生长过程中长出吸盘并固定,固定的部分又支撑后续生长。这个机制让机器人能跨越不连续表面——这是传统攀爬机器人做不到的。
②微结构生物膜作为可生长吸盘
生物膜不是事后贴上去的,而是在生长过程中自然外翻出来的。这模仿了爬山虎的吸盘生长方式。生物膜的吸附力来自范德华力和负压,对多种表面有效,可重复使用,无残留,吸附强度恰到好处(7-10 kPa)——太强会导致内部粘连堵死生长,太弱则吸附不住。
③SMA弹簧实现铰链式弯曲
在生长机器人上加弯曲机构不是新事,但大多数方案都重、慢、角度小。SMA弹簧轻、响应快、能弯80度,而且弯曲位置固定,不会随着生长而漂移。他们还用玻璃纤维隔热,防止高温熔化PE膜。
④基于吸附的收缩机制
生长机器人难收缩的根本原因是径向力会导致侧弯打结。他们用吸盘的吸附力抵消径向力,让收缩过程变成可控的剥离行为。这个思路比加额外的收缩机构要轻量得多。
⑤无人机+攀爬机器人协同
两个系统互补:无人机提供大范围机动能力,攀爬机器人提供精细的局部侦察能力。机器人可以从无人机上生长出来,进入无人机进不去的缝隙。这种异构协同的架构比单一形态的机器人适用范围更广。
04 总结与展望这个工作最让人印象深刻的地方是机制的完整性。他们从爬山虎的生长-攀爬行为中抽象出三个要素(驱动力、材料输送、吸附),然后用三种工程手段(气动、外翻、生物膜)一一对应实现。更难得的是,他们还多走了一步——让机器人能收缩。
从应用角度看,这个机器人填补了一个空白:不连续表面的攀爬。脚手架、格栅、镂空结构,这些地方以前没有合适的攀爬机器人能去。结合无人机后,能去的场景就更多了。
未来研究将聚焦于以下几个方向:
🔸吸附方案的可替换性:生物膜适用于干燥表面,如果遇到水下或油污环境,可以考虑换成湿吸附或电吸附模块。生长-攀爬机制本身是通用的,吸附层可以按需替换。
🔸更复杂的弯曲控制:目前SMA弹簧是开关式的,弯曲角度固定。如果能用脉宽调制或闭环控制,实现任意角度和连续曲率,可以适应更复杂的路径。
🔸生长速度与精度的平衡:气压越高生长越快,但过高会导致爆裂或失控。需要根据任务需求动态调节压力,或者引入机械限位。
🔸多机协同:如果多个这样的机器人能从同一个基站生长出来,形成网络,可以覆盖更大的区域。或者多个无人机携带多个机器人,同时侦察多个目标。
🔸自主路径规划:目前视觉检测只用来识别目标并决定左中右,如果能结合三维建图和全局路径规划,机器人可以在完全未知的环境中自主导航。
🔸材料耐久性:PE膜长期使用后可能疲劳破损,SMA弹簧也有循环寿命上限。需要研究更高强度、更耐久的材料组合。
从爬山虎到软体机器人,这个仿生学的故事讲得很完整。下一步,是让它从实验室走进真实的建筑工地、矿井、核电站。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。