英文题目:Formulating the Unicycle on the Sphere Path Planning Problem as a Linear Time-Varying System
中文题目:将球面独轮车路径规划问题表述为线性时变系统
作者:Federico Thomas, Jaume Franch
作者单位:ETSEIB 机器人与工业信息研究所 (CSIC-UPC)、
期刊:IEEE Transactions on Robotics(IF 10.5 中科院一区,JCR一区)
发表时间:2025年5月6日
链接:https://doi.org/10.1109/TRO.2025.3567525
引文格式:Thomas F, Franch J. Formulating the Unicycle on the Sphere Path Planning Problem as a Linear Time-Varying System[J]. IEEE Transactions on Robotics, 2024, 69(5): 3335-3346.
01全文速览球面上滚动的独轮车——这个听起来像杂技表演的系统,其实是机器人学中一个经典的非完整约束问题。它与平面上的独轮车(即常见的汽车模型)有着深刻的联系:当球面半径趋于无穷大时,前者退化为后者。
传统上,这类问题的研究依赖微分几何和非完整系统理论,门槛较高。巴塞罗那自治大学和加泰罗尼亚理工大学的研究团队另辟蹊径,他们把问题重新表述为线性时变系统,并利用一类特殊矩阵(可构成四元数基的反对称正交矩阵)的性质,找到了路径的闭式解析解。
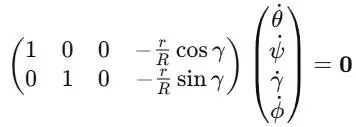
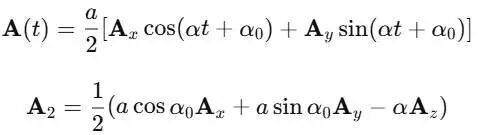
这个方法的关键在于:通过把参考系固定到独轮车上,让球面成为运动物体,系统的运动方程简化为



最终,路径规划问题归结为求解关于三个自由参数

核心亮点:
✅简洁建模:把非完整约束问题转化为线性时变系统
✅闭式解:状态转移矩阵可分解为

✅正弦输入:控制量自动为正弦函数,无需预设
✅通用解:三个自由参数可连接任意始末姿态(奇异情况除外)
✅平面退化:球面解可退化到平面,揭示了两类问题的内在联系
02研究内容🧩问题:球面上的独轮车怎么建模?
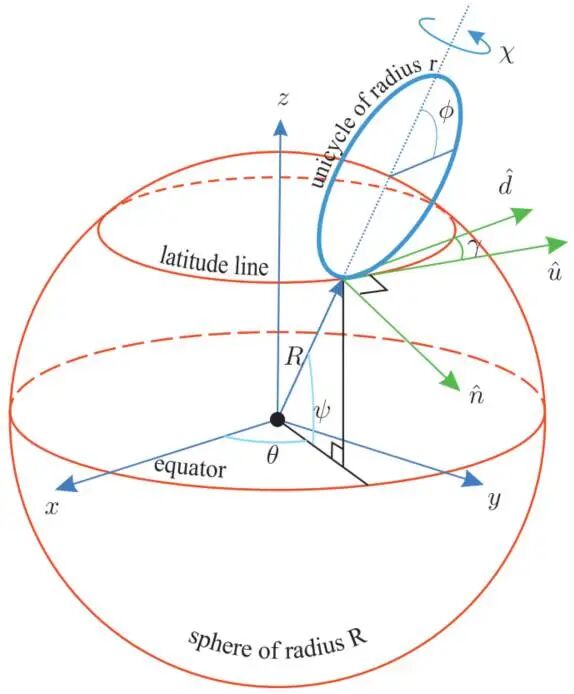
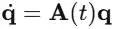
Figure 1:为了使用标准公式来表征独轮车在球体上的运动,需要三个参考系:一个用于球体,一个用于独轮车,第三个参考系其原点位于球体和独轮车之间的接触点。这会产生大量的符号。
图1展示了传统方法需要的三个坐标系:球面固连系、独轮车固连系、接触点坐标系。运动约束可写成
其中



🔄视角转换:让球面动起来
他们换了个思路:把参考系固连在独轮车上,让球面成为运动物体。这样,独轮车相当于给球面施加了一个约束:球面不能绕接触点的法向旋转。在球面本身的角速度


球面的姿态用单位四元数


其中
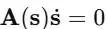
加上约束


这是一个线性时变系统,比原来的非线性约束方程简洁得多。
🧠核心条件:什么时候可以积分?
他们应用了Wu等人(1974-1975)关于线性时变系统可积性的理论:系统



而

把




这正是正弦信号的微分方程!所以

于是:
至此,所有矩阵都确定了。
📐参数求解:三个方程决定一条路
把时间归一化到[0,1],问题归结为求参数


设



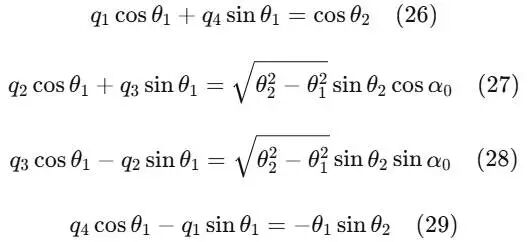
其中

这看似四个方程三个未知数,但由于四元数归一

经过变量代换,可以导出关于

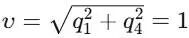
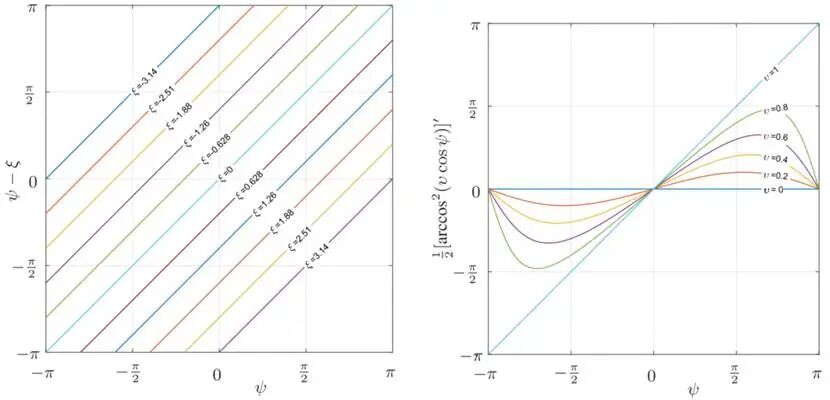
Figure 2:方程

图2展示了方程左右两边作为
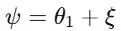




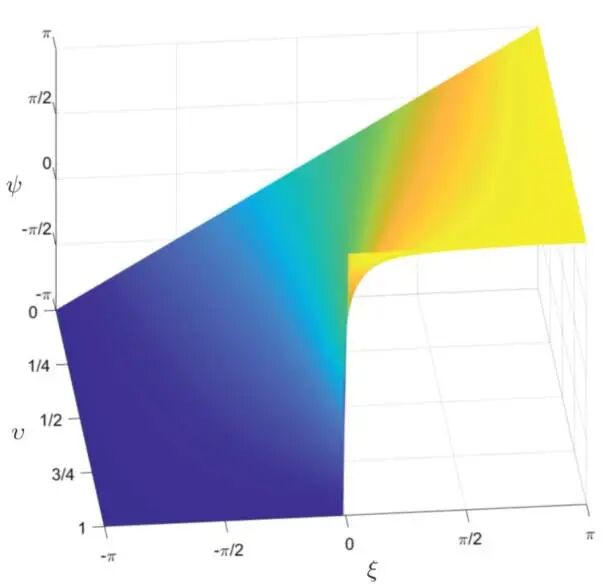
Figure 3:



图3是数值计算得到的


🧪实例验证:四种典型情况
他们用四个例子展示了方法的有效性:
例1:一般情况
目标姿态:


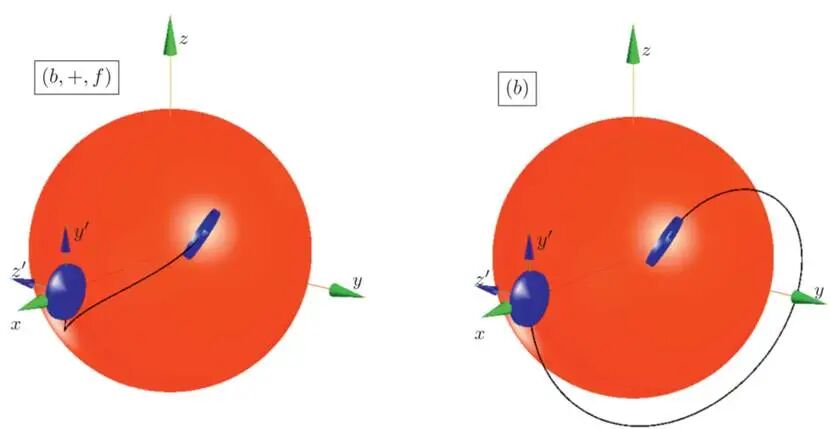
Figure 4:一般情况的两条路径
图4中,左路径的序列为

例2:奇异情况
目标姿态:


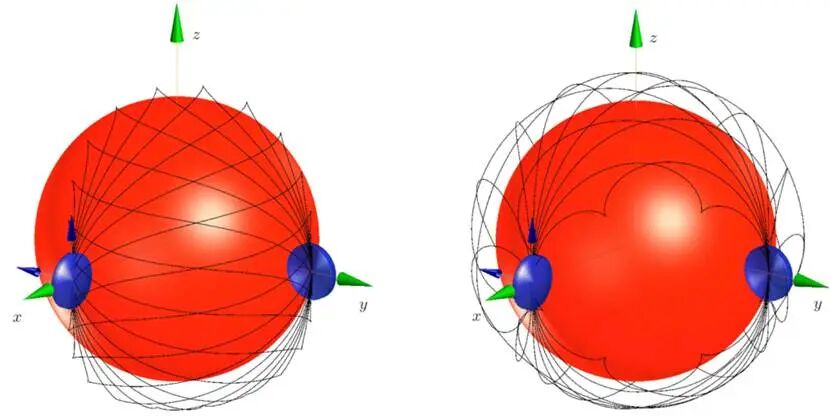
Figure 5:奇异情况下的路径族
图5左是目标姿态的路径族,右是其对跖姿态的路径族。图6则从每个族中选出一条路径,展示了8种不同的同伦类。
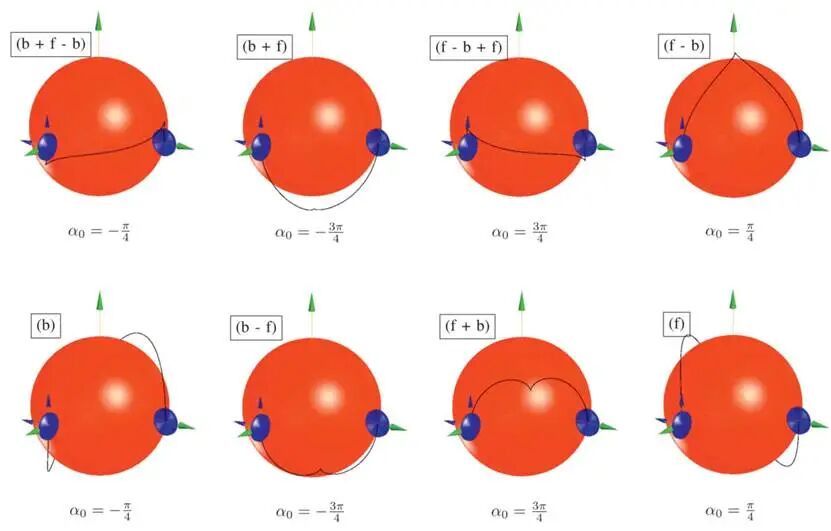
Figure 6:8种不同同伦类的路径
图9清晰地展示了路径的分类,以及对应的

例3:随机游走
他们用100个随机姿态生成了球面上的随机游走轨迹(图7左)。在存在圆柱障碍物的情况下,可以规划出绕障路径(图7右)。
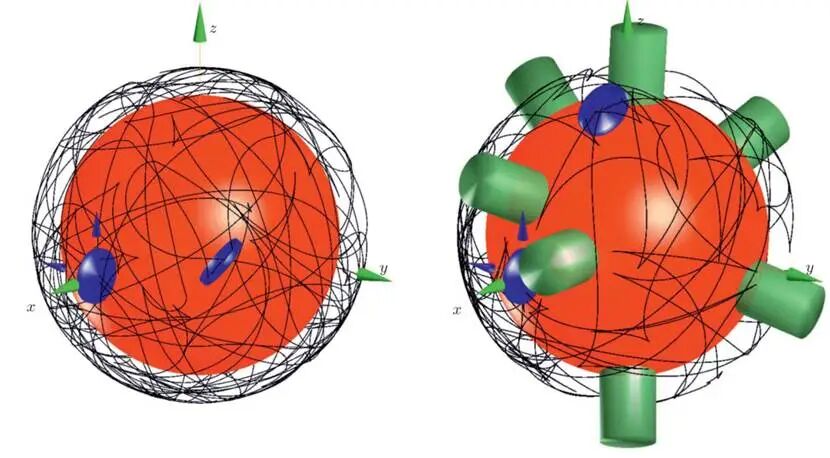
Figure 7:随机游走和绕障路径
图7左是无障碍随机游走,右是绕开七个圆柱障碍的路径。
例4:退化到平面
当独轮车运动范围很小时,球面可近似为平面。他们构造了一族目标姿态,生成了不同航向角

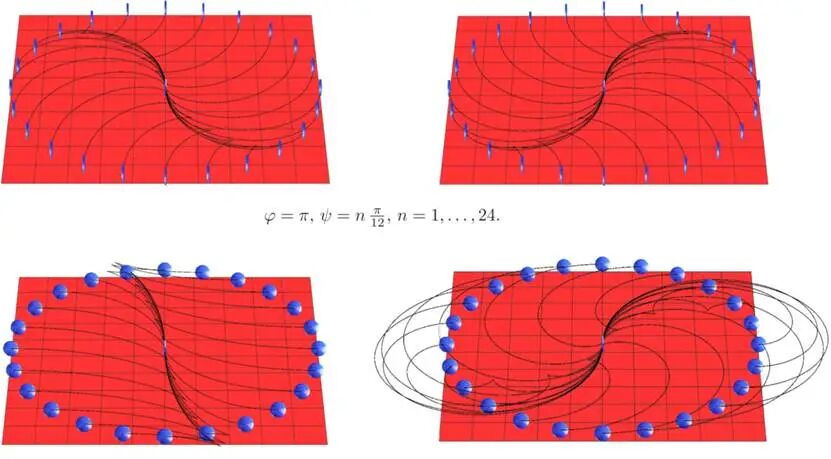
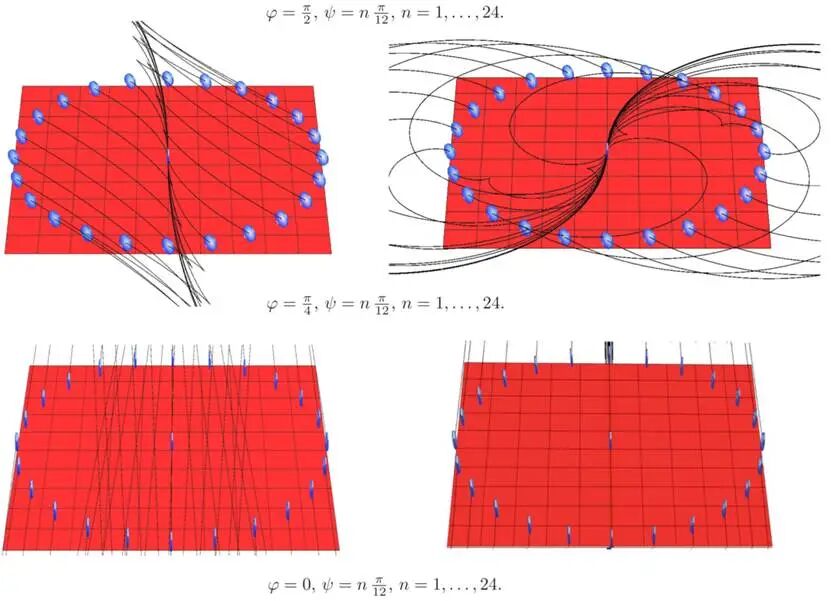
Figure 8:退化到平面的路径族
图8的四行对应不同航向角



①坐标系转换的奇效
把参考系从球面固连系改为独轮车固连系,让问题从非线性约束变为线性时变系统。这个视角转换是全文最核心的洞察,它让后续所有数学工具得以施展。
②利用矩阵代数的结构



③线性时变系统可积性条件的应用
Wu等人的理论(1974-1975)虽然年代久远,但用在这里恰到好处。它把解的存在性问题转化为


④完整的三参数族解
最终得到的解包含三个自由参数

⑤与平面问题的统一
当球面半径

这篇论文给人的启发是:有时候换一个坐标系,问题就能豁然开朗。原本需要微分几何和非完整系统理论的问题,被转化成了线性时变系统的积分问题,而后者可以用20世纪70年代的经典理论完美解决。
这种方法不仅简洁,而且深刻——它揭示了控制量必须是正弦函数的内在原因,给出了路径的闭式解,还自然地导出了路径的同伦分类。对于非完整系统研究者和机器人路径规划工程师来说,这都是一篇值得细读的佳作。
未来研究将聚焦于以下几个方向:
🔸解析解的近似:方程(38)目前需要数值求解,如果能有精度可控的解析近似,就可以把本方法嵌入到实时控制回路中,用于路径跟踪。
🔸曲率分析:生成的路径在S^3上是光滑的,但投影到S^2上可能产生尖点。如果能推导出曲率的最大最小值,就可以判断路径是否满足机器人的运动学约束。
🔸扩展到其他非完整系统:这种“线性时变系统+矩阵指数”的思路能否推广到其他非完整系统,如轮式移动机器人、蛇形机器人等?
🔸考虑动力学:目前只考虑运动学,如果加入质量、惯量、力矩等动力学因素,问题会复杂得多,但可能也有类似的简化方法。
🔸与全局规划器结合:本方法生成的是两点间的路径,如果需要全局避障,可以把它作为底层模块,嵌入到RRT、PRM等全局规划器中(如例3所示)。
🔸物理实现:本文的动机之一是控制非完整球关节。在实际机器人上实现本方法,并验证其精度和鲁棒性,是很有价值的工作。
从理论到实践,从球面到平面,这条路径规划的新思路还有很多值得探索的地方。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。