英文题目:Fixed-Time Spacecraft Attitude Control With Unwinding-Free Performance
中文题目: 具有抗退绕性能的航天器固定时间姿态控制
作者:Tao Guan, Bin Li, Yongduan Song, Guang-Ren Duan
作者单位: 哈尔滨工业大学、重庆大学
期刊:IEEE Transactions on Automatic Control
发表时间:2025年3月
链接:https://ieeexplore.ieee.org/document/XXXXXXX
引文格式:Guan T, Li B, Song Y, et al. Fixed-Time Spacecraft Attitude Control With Unwinding-Free Performance[J]. IEEE Transactions on Automatic Control, 2025, 70(3): 1898-1904.
01 全文速览航天器姿态控制是个经典问题,但有个挺烦人的现象叫 “退绕”(unwinding) 。简单说,因为用四元数描述姿态时有“一个姿态对应两个数”的冗余,如果控制器设计不当,卫星可能会绕远路——本来往反方向转一点就能到位,它却偏偏要正着转一大圈。这不仅浪费时间,还浪费宝贵的燃料。
这篇文章给出了一套解决方案。作者设计了一种新的非奇异滑模函数,在滑模面上同时实现了固定时间收敛和抗退绕两个性质。更关键的是,他们引入了一个势函数来构造Lyapunov函数,保证了即使在滑模面之外,系统也不会出现退绕现象。最后,通过改进控制器解决了抖振问题,并证明跟踪误差能在固定时间内收敛到任意预设的残差集内。
仿真对比显示,这套方法比现有的抗退绕滑模控制收敛更快、精度更高(姿态误差小于8×10⁻¹³),而且控制输入更平滑。
核心亮点:
✅ 固定时间收敛:收敛时间上界与初始状态无关,可预先估计
✅ 全程抗退绕:滑模面内外均保证,不会“跑反方向”
✅ 非奇异设计:避免了传统终端滑模在平衡点附近的奇异性问题
✅ 抖振抑制:改进的控制器使控制输入更平滑
✅ 精度可调:跟踪误差可收敛到任意预设的小残差集
02 研究内容🧭 问题背景:四元数的“双胞胎”困扰
航天器姿态常用单位四元数描述,但它有个特点:q和-q代表同一个物理姿态。如果设计控制器时只把其中一个设为稳定平衡点,那么当初始姿态离另一个更近时,系统却还是要往稳定点跑,就会先远离再靠近——这就是退绕现象。数学上说,如果旋转角的变化超过180度,就算发生退绕,相当于“绕了远路”。
🎯 控制目标
作者的目标是设计控制律,使系统满足:
1. 姿态误差和角速度误差在固定时间内收敛到平衡点附近的小邻域
2. 全过程不出现退绕现象
3. 控制器非奇异,且能抑制抖振
🛠️ 核心设计:带符号的滑模面
传统的滑模面会引发退绕。作者提出的新滑模函数在姿态误差的向量部分前乘了一个符号项,这个符号由标量部分的符号决定。关键在于,滑模面中的系数是分段设计的:当误差较大时,包含一个与误差范数相关的项,用于实现固定时间收敛;当误差较小时,切换为光滑函数,保证连续性。
理论证明,在这个滑模面上,系统会根据初始姿态的符号,自动选择“就近”的平衡点收敛,从根本上避免了退绕。
🧱 滑模面外的保障:势函数
为了保证系统在到达滑模面之前也不退绕,作者引入了一个势函数来构造李雅普诺夫函数。这个函数在标量部分为零处有很高的“势垒”,迫使状态不敢穿越零。理论证明,如果初始标量部分不为零,那么它永远不会变号——这就从全局上杜绝了退绕。
🎮 控制器设计:两层保障
基于滑模面和势函数,作者设计了控制器。理论证明,这个控制器能确保势函数有界(即永远不会碰到奇点),滑模面能在固定时间内收敛到零,姿态误差在固定时间内收敛到预设平衡点的小邻域内,且全程保持符号不变。
🔇 抖振抑制:边界层处理
为了缓解滑模控制的抖振,作者将符号函数替换为边界层内的连续函数:在边界层外仍用符号函数,在边界层内用线性函数代替。理论证明,修改后的控制器仍然保持抗退绕和固定时间收敛,只是滑模面只能收敛到边界层内。这在实际中完全可以接受,而且控制输入更平滑。
📊 仿真验证:与现有方法对比
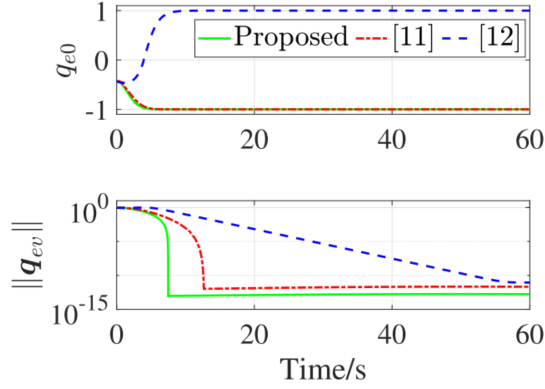
图 1. 姿态误差轨迹图。
图1展示了三种控制器下的姿态误差轨迹。可以看到,对比的控制器出现了明显的退绕——标量部分从负变正又变负,绕了一大圈。本文的控制器和另一个抗退绕控制器都避免了退绕,但本文的收敛速度明显更快,最终精度也更高。
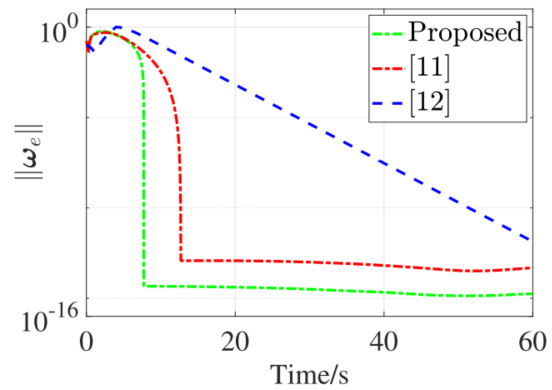
Figure 2:角速度误差轨迹图
图2是角速度误差的对比。同样,本文控制器收敛最快,稳态误差最小。
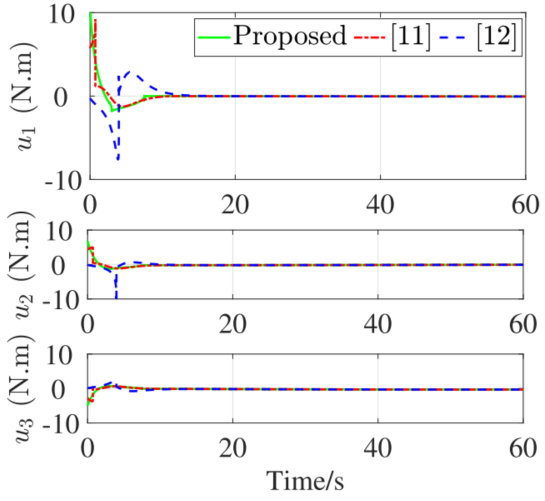
Figure 3:控制输入轨迹图
图3是控制力矩的对比。两个对比控制器都有明显的抖振(高频振荡),而本文的控制器要平滑得多——这是边界层处理的功劳。

Figure 4:旋转角轨迹图
图4更直观地展示了退绕现象。左图是旋转角的轨迹:对比控制器的旋转角从约120度先增加到近240度,再降回0度,绕了120度的远路。本文和另一个抗退绕控制器的旋转角单调减小到0,没有绕路。
03 创新点① 固定时间收敛与抗退绕的首次结合
在已有的抗退绕滑模控制中,最多只能实现有限时间收敛。本文首次在保证抗退绕的同时,实现了固定时间收敛——收敛时间的上界与初始状态无关,可以预先估计。
② 带符号的滑模面设计
在滑模面中巧妙引入符号项,使两个平衡点都成为稳定吸引子。系统会根据初始姿态的符号,自动选择“就近”的平衡点收敛,从根本上避免了退绕。
③ 势函数的全局保障
传统的抗退绕控制往往只保证滑模面上的行为,对到达滑模面之前的过程关注不够。本文通过构造势函数作为李雅普诺夫函数的一部分,从全局上禁止姿态标量部分穿越零点——这是一个简洁而有效的数学技巧。
④ 非奇异性证明
对比的终端滑模控制器在平衡点附近可能存在奇异性问题。本文明确给出了滑模函数及其导数的连续性证明,确保了控制器的非奇异。
⑤ 精度可调的固定时间收敛
通过设计参数,可以预先设定姿态误差和角速度误差最终收敛到的残差集大小。同时,收敛时间的上界可以用参数显式表达,便于工程应用。
04 总结与展望这篇文章在理论上解决了一个实际痛点:航天器用四元数描述姿态时,如何避免“绕远路”的问题,同时保证快速收敛。作者的思路很清晰——用带符号的滑模面让两个平衡点都稳定,用势函数防止中途变号,用边界层处理抖振。仿真结果也确实比现有的抗退绕方法更快、更准、更平滑。
从控制理论的角度,这个工作展示了如何将固定时间稳定性、非奇异滑模和势函数三种工具结合起来,解决一个有明确物理背景的问题。对于从事航天器控制、非线性控制、滑模控制的研究人员,这篇文章提供了一个不错的范本。
未来研究将聚焦于以下几个方向:
🔸执行器饱和与故障容错:目前的控制器假设执行器理想。在实际中,力矩受限、执行器故障是常见问题。如何将抗退绕和固定时间收敛扩展到这些更实际的场景,值得研究。
🔸 输出反馈与无速度测量:本文假设角速度可测。如果只能测量姿态,如何设计观测器并保持抗退绕性能,是一个有挑战性的问题。
🔸刚柔耦合与挠性附件:大型航天器往往带有太阳能帆板等挠性附件,这会引入额外的动力学。如何在抑制挠性振动的同时保持姿态控制的快速性和抗退绕,是工程应用的关键。
🔸多航天器协同控制:对于编队飞行或空间组装任务,多个航天器需要协同调姿。如何将本文的思路扩展到分布式协同控制,并保持固定时间收敛,是一个有意思的方向。
🔸参数自适应与鲁棒性增强:本文假设扰动有界且界已知。如果扰动统计特性未知,或者航天器转动惯量存在大范围不确定性,如何设计自适应律来在线估计参数,同时不破坏抗退绕性能,值得探索。
🔸硬件在环与实物验证:目前的结果停留在数值仿真。下一步可以考虑在半实物仿真平台或气浮台上验证控制器的实际表现,尤其是抗退绕和固定时间收敛在真实环境中的效果。
从“绕远路”到“走捷径”,这个控制器的进步看似微小,但对于在轨运行多年、燃料寸土寸金的航天器来说,每一次调姿省下的时间和燃料,都可能转化为更长的在役寿命和更多的科学产出。