论文信息
英文题目:Ultrafast elastocapillary fans control agile maneuvering in ripple bugs and robots
中文题目: 超快弹性毛细扇叶控制溪蟉与机器人的敏捷机动
作者:Victor M. Ortega-Jimenez, Dongjin Kim, Sunny Kumar, Changhwan Kim, Je-Sung Koh, Saad Bhamla(共同通讯)
作者单位: 美国缅因大学、加州大学伯克利分校、韩国亚洲大学、佐治亚理工学院
期刊:Science(IF 45.8中科院一区,JCR一区)
发表时间:2024年11月15日
链接:https://doi.org/10.1126/science.adv2792
引文格式:Ortega-Jimenez V M, Kim D, Kumar S, et al. Ultrafast elastocapillary fans control agile maneuvering in ripple bugs and robots[J]. Science, 2025, 389: 811-817.
01 全文速览溪流湍急,水面不稳,但有一种几毫米长的小虫子——溪蟉(Rhagovelia)——却能在这样的环境里来去自如,急转、刹车、加速,敏捷程度堪比果蝇。它们的秘密武器,是中足末端一把可以自动开合的扇形结构。
本文揭示了这把“扇子”的工作原理:它不是靠肌肉控制,而是靠弹性毛细效应——入水时表面张力在10毫秒内将其迅速展开,出水时又在同样短的时间内收拢。这种扁平的带状微结构,在展开时能产生足够的推力,收拢时又能减少水面的阻力。
基于这一原理,作者用聚酰亚胺薄膜做了一个1毫克重的仿生扇叶,装在一个0.23克的机器人(Rhagobot)上。机器人的速度和转向能力因此大幅提升:带扇叶比不带扇叶的版本,速度提高41%,转向角速度达到206°/秒。
核心亮点:
✅ 超快响应:扇叶10毫秒内完成展开/收拢,纯物理作用,无需肌肉控制
✅ 结构精巧:扁平带状设计,在垂直方向软(易折叠),在水平方向硬(抗水流)
✅ 性能飞跃:带扇叶的机器人速度提升41%,转向角速度206°/秒
✅ 野外实测:溪流流速可达1.6 m/s,湍流强度65%,虫子依然行动自如
✅ 持续活动:溪蟉几乎不停地在划水,一天可移动约13公里
02 研究内容🐞 溪蟉的扇子:不是装饰,是工具
图1a-c展示了溪蟉中足末端的扇形结构。扫描电镜图像(图1c)显示,这把扇子由许多扁平的带状“羽枝”和更细的“小羽枝” 组成。这种扁平形状很关键——它不是圆的,而是像扁面条一样。
作者做了几个简单的实验来证明这把扇子的工作方式:
实验一:离体扇子的反应(图1e)
用一根头发丝夹住从虫子身上取下的扇子,轻轻接触水滴。结果:接触水面后约10毫秒,扇子完全展开;提出水面后,又在约10毫秒内收拢。这说明开合过程完全是被动的,不需要肌肉或神经控制。
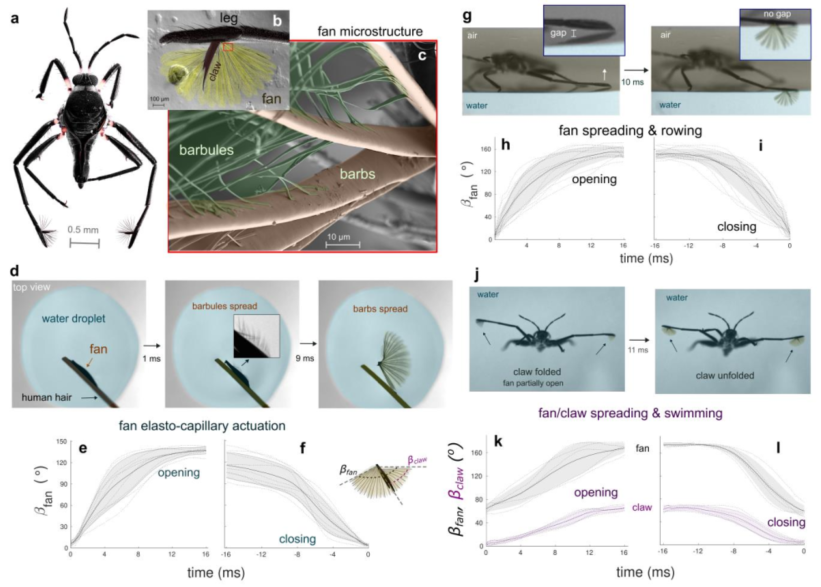
图1 Rhagovelia扇形微观结构和铺展性能。 a,Rhagovelia obesa,中腿末端有扇子和爪子。 b,扇子和爪子的图像。 c,倒刺和小羽枝的平带微观结构的SEM图像。 d,视频帧显示了孤立风扇之前(左)和放置在水滴上时的俯视图。小羽枝在 1 秒后扩散(中),倒刺在 10 秒后扩散(右)。隔离风扇在打开 (e) 和关闭 (f) 期间的展开角 (βfan) 的时间序列。 g,划船个人之前(左)和风扇在水中完全打开时(右)的视频帧。打开 (h) 和关闭 (i) 期间风扇展开角 (βfan) 的时间序列。 j,游泳者之前(左)和风扇完全打开时(右)的视频帧。在爪子开始张开之前,风扇仍部分展开。打开 (k) 和关闭 (l) 期间风扇和爪的张开角度(βfan 和 βclaw)的时间序列。图中的线条、阴影和虚线分别表示平均值、一个标准差和单个数据。
实验二:活体虫子划水时的扇子动态(图1g-i)
虫子划水时,腿一沾水扇子就展开,保持整个划水过程(约50毫秒);腿一离开水扇子就收拢。这个节奏和离体实验高度吻合。
视频S1
实验三:水下游泳时的扇子动态(图1j-l)
如果虫子一直在水下游泳,扇子不会完全收拢,因为水的浮力和阻力让收拢变得困难。这时虫子会用爪子主动把扇子合上——说明被动为主,主动为辅,两者结合。
🔧 仿生扇叶的设计:刚度各向异性是关键
受溪蟉启发,作者用聚酰亚胺薄膜做了一个仿生扇叶(图2a-d),厚度16微米,共21根“羽枝”,用PET胶带连接。这个设计的关键在于两个方向的刚度差异:
- 绕y轴弯曲(收拢方向):刚度取决于厚度³,16微米的薄膜在表面张力作用下很容易弯曲(图2f)
- 绕z轴弯曲(划水方向):刚度取决于宽度³,0.3毫米宽的羽枝在水流阻力下几乎不变形(图2g)
图2h-i给出了理论计算:要使扇叶能靠毛细力收拢,厚度必须小于16.3微米(矩形截面)或半径小于11.1微米(圆形截面)。图2j显示,在相同收拢能力的前提下,矩形截面(0.3毫米宽)在水流中的变形远小于圆形截面——这就是扁平带状的优势。
图2k-l是仿生扇叶的实际动态:入水约120毫秒展开,出水约80毫秒收拢(视频S2)。时间比虫子长,但趋势一致。
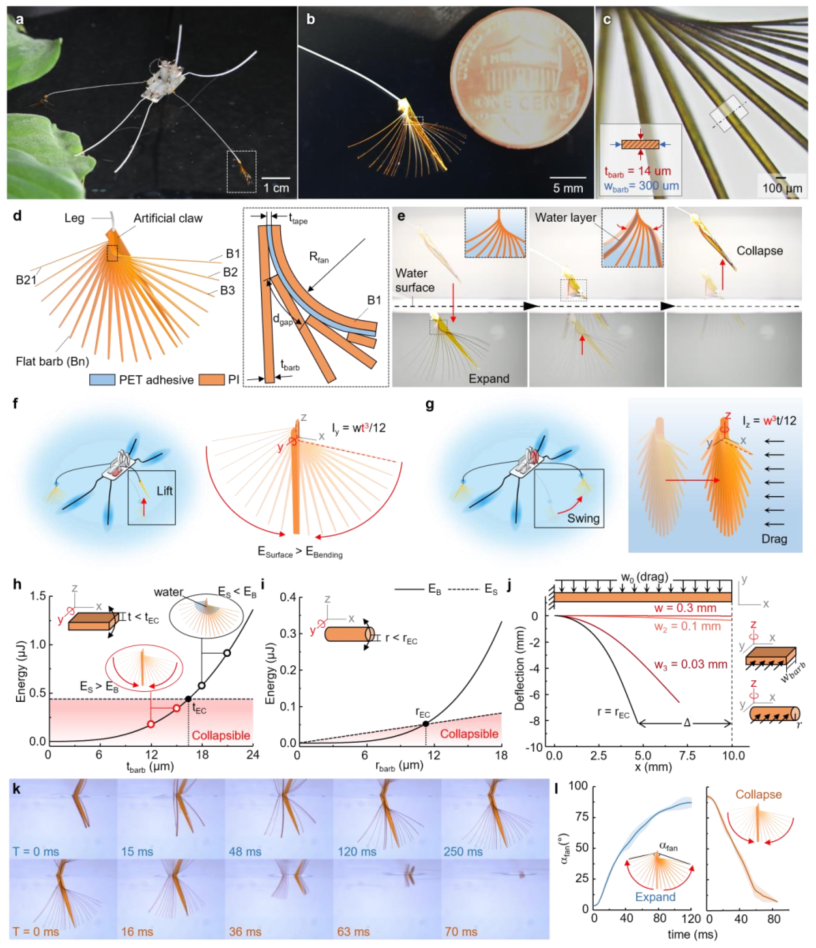
图2 弹性毛细管驱动的机器人风扇设计与机理. a,0.23g 的半水生机器人,Rhagobot,中腿末端有可自我变形的风扇。 b,1毫克机器人风扇在水下膨胀。 c,风扇的特写视图,显示了模仿生物对应物结构的平带倒刺。倒刺的厚度和宽度经过优化,可抵抗阻力并实现毛细管变形。 d,由21个倒刺(B1~B21)和一个人造爪组成的扇子示意图。曲率半径 (Rfan) 和每个倒刺起点之间的距离 (dgap) 决定了扇形结构。倒钩(tbarb)和PET粘合剂(tape)的厚度决定了结构是否会倒塌。 e,显示风扇膨胀和折叠的图像序列。扇子在水下保持其展开的形状(左),从水中升起时由于毛细管力而开始塌陷(中),并在水面上方的人工爪方向完全塌陷(右)。机器人将腿从水中抬起 (f) 并在水下摆动 (g) 的示意图,展示了毛细管驱动塌陷所需的 y 轴 (f) 周围的低弯曲刚度和 z 轴 (g) 周围的高弯曲刚度,以防止因阻力而弯曲。弯曲(实线)和表面(虚线)能量作为具有矩形横截面 (h) 和圆形横截面 (i) 的倒刺的厚度和半径 (tbarb, rbarb) 的函数。厚度必须小于弹性毛细管厚度和半径(tEC,rEC)才能实现毛细管力驱动的塌陷。计算详情参见附表2。 j,拖曳力作用下具有圆形和矩形横截面的毛细管驱动梁的变形比较。 k,图像序列显示机器人风扇在入水时膨胀(顶部),在离开水时收缩(底部)。 l,风扇在进入和离开水中时膨胀和塌陷时的角度(αfan)轮廓。
🤖 Rhagobot:会急转弯的微型机器人
机器人(图3a)用4个形状记忆合金(SMA)驱动器控制两条腿,每条腿有水平和垂直两个自由度(图3b)。通过不同的驱动序列(图3c),可以实现前进、边进边转、原地旋转三种动作。
对比实验很直接(图3d-e):同样输入信号,带扇叶的机器人比不带扇叶的走得更远、转得更急。PIV流场分析(图3f)显示,带扇叶的腿能诱导出更高的流速(增加33%)和涡量(增加24%)。
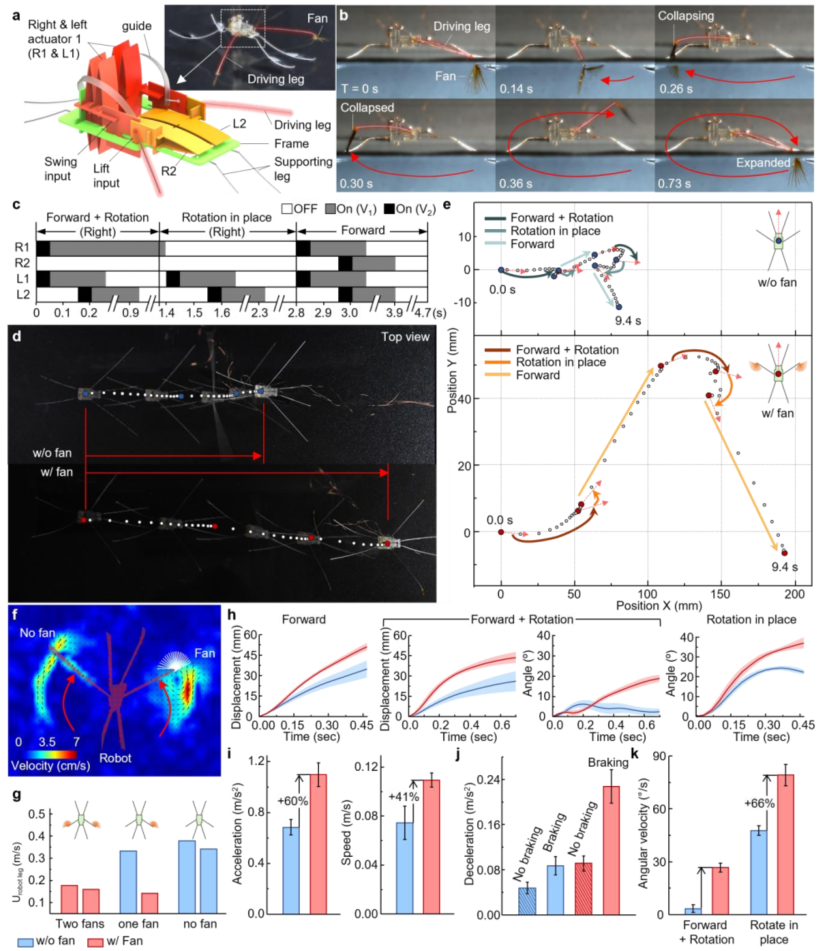
图3 Rhagobot 控制、性能和敏捷性。 a,由四个基于 SMA 的执行器驱动的 rhagobot 的 CAD 模型。 b,一系列图像显示机器人的右侧使用自变形人造风扇进行划船运动。 c,四个执行器(R1、R2、L1、L2)的驱动电压序列,以实现三种不同的运动:前进时旋转、原地旋转和向前运动。高电压 (V2) 在 50 ms 内引起执行器完整冲程,较低电压 (V1) 可维持执行器的延伸状态,而不会导致 SMA 过热。 d,有风扇和没有风扇的情况下水面上三个连续向前运动的比较。 e,有风扇和没有风扇的机器人执行三种运动的轨迹:前进时旋转、原地旋转以及左右两侧向前运动。 f,使用 PIV 比较带风扇的摆动腿和超疏水涂层腿的速度场。 g,三种机器人配置的腿部速度比较:双腿都配备风扇、只有一条腿配备风扇、以及两条腿都配备风扇。 h,带风扇和不带风扇的机器人的距离和身体角度轮廓。 i-k,加速度、速度(i)、减速度(j)和角速度(k)的对比分析,展示了配备风扇的机器人的优越性能。
数据量化:带扇叶的机器人,加速度提高60%,速度提高41%,最大速度16.16 cm/s(约2倍体长/秒);最大转向角速度206°/秒;刹车减速能力也更强(图3j)。
🌊 湍流环境中的生存之道
图4c-d是野外拍摄的溪流,几只溪蟉在水面上活动。图4e显示它们在静水中的轨迹比较规则,而在流水中(图4d)轨迹就乱得多。图4f-g的PIV数据显示,它们生活的溪流流速可达1.6 m/s,湍流强度高达65%。
在这样的环境里,如果没有快速响应的扇子,很难想象它们能稳住。作者还发现,溪蟉几乎全天候不停地在划水,只有蜕皮、进食或清理时才短暂休息。按平均速度0.14 m/s算,一天能移动约13公里——和果蝇的迁徙距离相当。寿命最长约8个月,总里程可达3000公里。
⚡ 和其他生物及机器人的对比
图4a把目前报道的半水生机器人按重量和速度画了个图。Rhagobot(0.23 g,~2 BL/s)处于中小型机器人的上沿位置。图4b总结了四种推进方式:
- 大刚性桨:大型机器人用,力大但笨重
- 细疏水腿:中小型机器人用,靠表面张力,力小
- 被动 flap:水下前后摆动,恢复行程损失推力
- 可折叠扇叶(本文):入水展开产生推力,出水收拢减少阻力
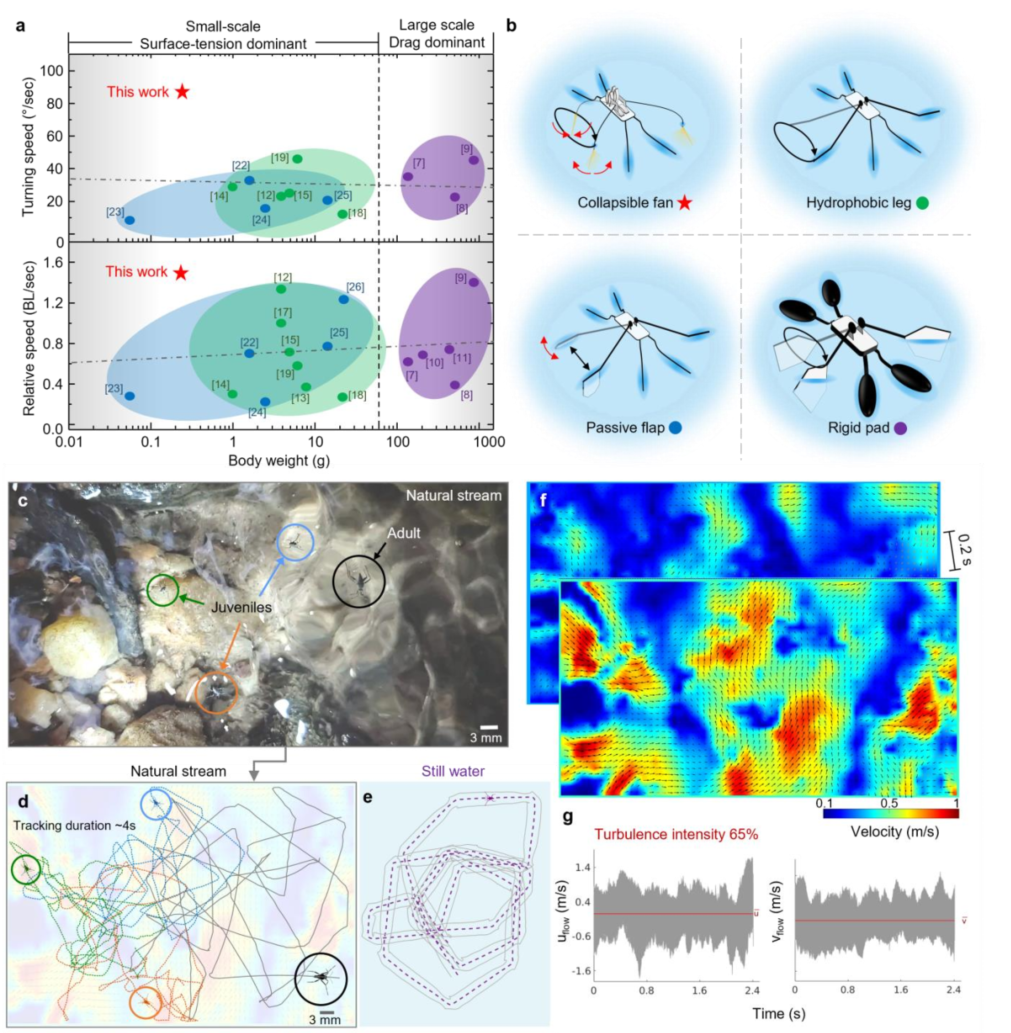
图4 半水生机器人比较和自然溪流中的流动条件。 a,半水生机器人相对于体重的转动速度和相对速度比较。虚线表示机器人性能数据的线性拟合。 b,半水生机器人四种不同推进机制的示意图:用可折叠风扇划船(左上)、用细疏水腿划船(右上)、前后摆动被动襟翼(左下)和用大刚性垫划船(右下)。有关机器人的详细信息,请参阅补充表 7。 c,视频帧显示一名成人和三名青少年在自然溪流中移动。颜色代表每个单独的跟踪。 d,这些人在大约 4 秒内遵循不规则的轨迹。 e,个人在静水中划船所遵循的常规路径。 f,这些个体在原位经历的流动条件的速度场。请注意 0.2 秒后流速的巨大变化。 g,Uflow和Vflow的时间序列。湍流强度(流速变化与平均流速之比)约为 65%。
另一个有趣的对比:溪蟉急转弯的性能(90°转弯,耗时50 ms,角速度4200°/s)和果蝇的空中急转(93°,49 ms,5000°/s)处于同一量级。一个是水面划水,一个是空中飞行,机制完全不同,但性能相当。
03 创新点① 揭示“弹性毛细”被动驱动机制
溪蟉的扇子不是靠肌肉主动打开,而是靠表面张力和结构弹性的平衡。这个机制在自然界里不算罕见(比如毛笔入水分叉),但在动物 locomotion 上的应用和定量表征,这个工作做得比较系统。
② 扁平带状结构的刚度解耦设计
圆形截面要同时满足“易折叠”和“抗水流”两个条件很困难,因为两个方向的刚度耦合在一起。扁平带状的巧妙之处在于:厚度决定折叠难易,宽度决定抗弯能力,两个方向可以独立设计。图2j的对比很直观。
③ 10毫秒级的超快被动响应
10毫秒是什么概念?昆虫神经肌肉回路的反应时间通常在几十到几百毫秒。这种完全依赖物理效应的被动驱动,速度远快于主动控制。对于在湍流中生存的小虫子,这个速度优势可能是决定性的。
④ 从生物到机器人的完整复现
这个工作不是只停留在生物观察,而是把发现的关键原理提炼出来,做了一个功能性的仿生扇叶,装在机器人上验证了性能提升。图4的对比实验设计得很干净:同样的机器人、同样的输入信号,唯一变量是有没有扇叶。
⑤ 提出“可折叠扇叶”作为中小型水面机器人的新推进方式
图4b总结了四种推进方式,可折叠扇叶在“中小尺度+高效率”这个区间填补了一个空白。它既不像大刚性桨那样笨重,也不像细疏水腿那样推力不足,也不像被动 flap 那样有恢复行程的损失。
04 总结与展望这个工作让人印象最深的一点是:溪蟉的扇子是一个“预适应”的结构——平时折叠起来不碍事,沾水就自动展开干活,出水又自动收好。这种被动响应的设计,比任何需要传感器和控制器的主动系统都要可靠和快速。
从工程角度,这个思路可以用在很多地方:水下航行器的可变形桨叶、微型机器人的自适应足端、甚至可展开的太空结构。用材料的弹性,而不是电机的驱动,来实现形状的变化,在很多尺度上都有潜力。
未来研究将聚焦于以下几个方向:
🔸 尺度效应研究:本文的扇叶和机器人比原生物种大了约20倍。如果把结构缩小到和虫子一样大(亚毫米级),材料选择和制造方法可能都要变。微纳加工或许是个方向。
🔸 多扇叶协同:Rhagobot只有两条腿装了扇叶。如果六条腿都能装,或者扇叶数量和排列方式可调,能实现更复杂的运动模式。
🔸 自主能源和控制:目前机器人是外接电源和信号。如果要把电池和控制电路集成到0.2克的尺度,需要微电子和微能源方面的突破。
🔸 扇叶材料的优化:聚酰亚胺是个不错的起点,但如果要做柔性电路、感知功能、或者生物相容的应用,可能需要复合材料和功能涂层。
🔸 集群行为研究:溪蟉在自然界中经常成群活动。如果多个这样的机器人能在水面上协同运动,会有什么新的能力?
🔸 湍流环境下的控制策略:本文展示了扇叶在静态和低速下的性能。但在1.6 m/s流速、65%湍流强度的真实溪流里,如何保持稳定和方向,还需要更深入的研究。
从溪蟉的扇子到Rhagobot,这个仿生学的故事讲得很完整。接下来要看,这把扇子还能打开哪些新世界的大门。