
英文题目:Agile and cooperative aerial manipulation of a cable-suspended load
中文题目: 缆索悬挂负载的敏捷协同空中操纵
作者:Sihao Sun, Xuerui Wang, Dario Sanalitro, Antonio Franchi, Marco Tognon, Javier Alonso-Mora
作者单位: 荷兰代尔夫特理工大学、英国利物浦大学、法国CNRS、意大利特伦托大学、丹麦奥尔堡大学
期刊:Science Robotics(IF 27.5中科院一区,JCR一区)
发表时间:2025年10月29日
链接:
https://www.science.org/doi/10.1126/scirobotics.adu8015
引文格式:Sun S, Wang X, Sanalitro D, et al. Agile and cooperative aerial manipulation of a cable-suspended load[J]. Science Robotics, 2025, 10: eadu8015.
01 全文速览多旋翼吊运负载不是新事,但现有方法只能让系统慢慢悠悠地飞——速度不超过1.5米/秒,加速度不超过0.5米/秒²。一旦飞得快一点,缆绳一斜,负载一晃,控制就崩了。
代尔夫特理工领衔的团队这次把速度上限提高了一个量级:三架无人机吊着1.4公斤的负载,飞出5米/秒的速度、8米/秒²的加速度,还能钻过比系统自身宽度还窄的缝隙。
他们解决这个问题的思路不是把控制器调得更猛,而是换了个框架:把“控制”问题转化成“规划”问题。传统方法是外环算力、内环跟踪,假设负载运动比无人机慢——这在低速时成立,高速时就不成立了。他们改用在线轨迹规划,直接算出未来2秒内无人机和负载的完整运动轨迹,然后让无人机沿着轨迹飞。
这个框架的另一个好处是鲁棒性强:负载质量算错50%、突然塞进去一个滚动的篮球、5米/秒的风吹着——都能稳住。而且全程不需要在负载上装任何传感器,全靠无人机自己的状态估算负载的位置。
核心亮点:
✅ 速度跃升:5米/秒速度,8米/秒²加速度,比现有方法快一个数量级
✅ 动态避障:能在飞行中重新规划路径,钻过比系统宽度还窄的缝隙
✅ 无传感器吊运:不依赖负载上的任何传感器,全靠无人机数据估算负载状态
✅ 强鲁棒性:50%质量误差、滚动负载、5米/秒侧风,都能应付
✅ 可扩展:仿真做到9机协同,CPU时间仍可控
02 研究内容🧩 问题:为什么多机吊运飞不快?
图1A比较了本文方法和两种基线方法(几何控制、NMPC)跟踪同一个“8”字形轨迹的效果。基线方法在速度2米/秒、加速度2米/秒²时还能勉强跟上,一旦加速度提到4米/秒²以上,直接炸机。
原因有三:
1. 级联控制假设不成立:传统方法假设负载动态比无人机慢得多,外环算力、内环跟踪。高速时这个假设不成立,内环跟不上外环指令。
2. 模型依赖太强:负载质量、惯量稍有偏差,控制力分配就出错。
3. 需要负载上的传感器:为了闭环,得在负载上装动作捕捉标记或摄像头,工程麻烦,信号还有延迟。
📊 实验1:敏捷轨迹跟踪
图2A的对比很直观。红色是本文方法,蓝色和绿色是两种基线。在跟踪“Fast”轨迹(速度5米/秒,加速度8米/秒²)时,基线直接炸了,本文方法稳稳飞完。
表1给出了定量数据。从Slow到Fast,本文方法的位置均方根误差从0.031米增加到0.197米,姿态误差从5.2度增加到12.9度。作为对比,基线在Medium Plus(速度2米/秒,加速度4米/秒²)就炸了。
表 1. 位置跟踪结果。将 RMSE 定位在具有不同敏捷级别的跟踪参考中。所有参考轨迹均呈八字形。我们的方法大大优于两种基线方法 [几何 (14) 和 NMPC (12)],特别是在跟踪敏捷轨迹方面。基线方法是在模拟环境中进行测试的,而我们的方法是在模拟和现实实验中进行测试的。

🛤️ 解法:基于轨迹的框架
图1是整体框架。核心是把“控制”问题转成“规划”问题:
- 中央规划器(10Hz运行):求解一个有限时域最优控制问题,预测未来2秒内无人机和负载的完整状态,考虑动力学耦合、推力限制、避障约束。
- 机载跟踪控制器(300Hz运行):用增量非线性动态反演(INDI)跟踪规划器下发的轨迹,同时用IMU测量补偿缆绳拉力。
- 负载状态估计器:只用无人机的位置、速度和IMU数据,通过扩展卡尔曼滤波估算负载的位姿和缆绳方向。
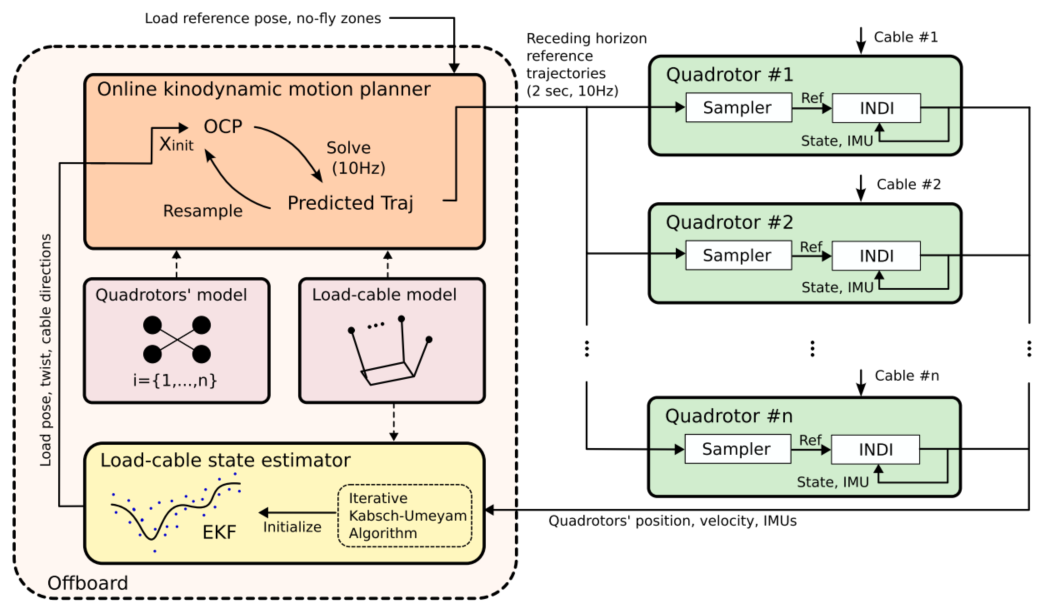
Figure 1:方法概述。我们的框架包括一个运动动力学运动规划器,以 10 Hz 的频率在线求解 OCP,以在给定负载参考姿态和预定义禁飞区的情况下生成四旋翼飞行器的后退地平线参考轨迹。 OCP使用了系统的整体动力学,包括四旋翼模型和负载电缆模型。负载的位姿、扭转和电缆方向是从基于 EKF 的估计器获得的。 OCP初始状态下的剩余元素,即电缆方向和张力的导数,是通过对先前生成的预测轨迹进行重新采样来获得的,以避免当新参考到达时四旋翼飞行器的振荡运动。负载状态估计器融合负载电缆模型和四旋翼飞行器的位置、速度和 IMU 测量值,以获得负载位姿、扭曲和电缆方向的估计。它是通过给定初始四旋翼状态的迭代 Kabsch-Umeyama 算法进行初始化的。每个四旋翼飞行器上都有一个基于时间的采样器,使用当前时间戳对接收到的后退地平线参考轨迹进行采样,生成单个参考点,该参考点由基于 INDI 技术的轨迹跟踪控制器进行跟踪,该技术将电缆张力视为外部干扰,并使用 IMU 测量对其进行补偿。
Movie S1:仿真中与基线方法的对比
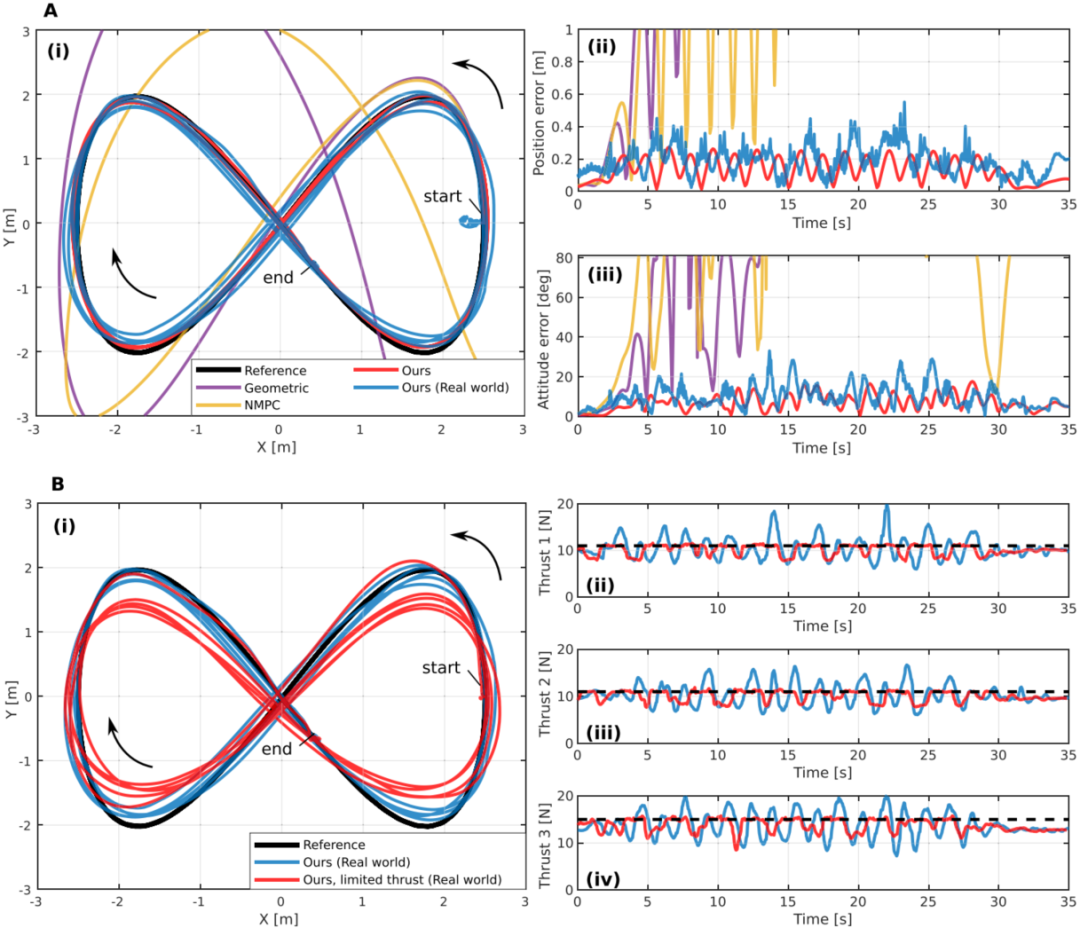
Figure 2: 图 2. 快速跟踪参考的性能。 (A) 实验将我们的方法与两种基线方法进行比较,以遵循参考轨迹 Fast,这是一个最大速度为 5 m/s 且 𝑎max 为 8 m/s2 的八字形轨迹。参考文献的详细表达如表S1所示。 (i) 负载重心飞行路径的俯视图。 (ii 和 iii) 负载位置和负载姿态跟踪误差的 RMSE 时间历史。我们使用轴角表示来表示姿态误差。(B) 实验比较我们在跟踪参考快速时有和没有加紧推力限制的方法。 (i) 负载重心飞行路径的俯视图。一旦最大推力受到限制,系统就无法准确遵循参考轨迹(红色)。 (ii 到 iv) 三个四旋翼飞行器在推力限制减小的情况下的指令集体推力(黑色虚线)。
图2B是另一个实验:故意把两个无人机的最大推力从20牛降到11牛,第三个降到15牛。规划器自动调整了轨迹的曲率,让推力不超限。虽然跟踪误差大了些(0.363米),但系统没炸。
🚧 实验2:动态避障
图3A是钻垂直缝隙。系统宽度1.4米,缝隙只有0.8米宽。规划器让负载倾斜70度,无人机张开,在1.2秒内钻了过去。最高速度4米/秒,加速度5米/秒²。
图3B是钻水平缝隙。系统悬停高度1.2米,缝隙只有0.6米高。规划器让无人机几乎拉平缆绳,利用动量冲过去。钻过去那一刻,缆绳几乎是水平的,垂直方向靠惯性撑着。
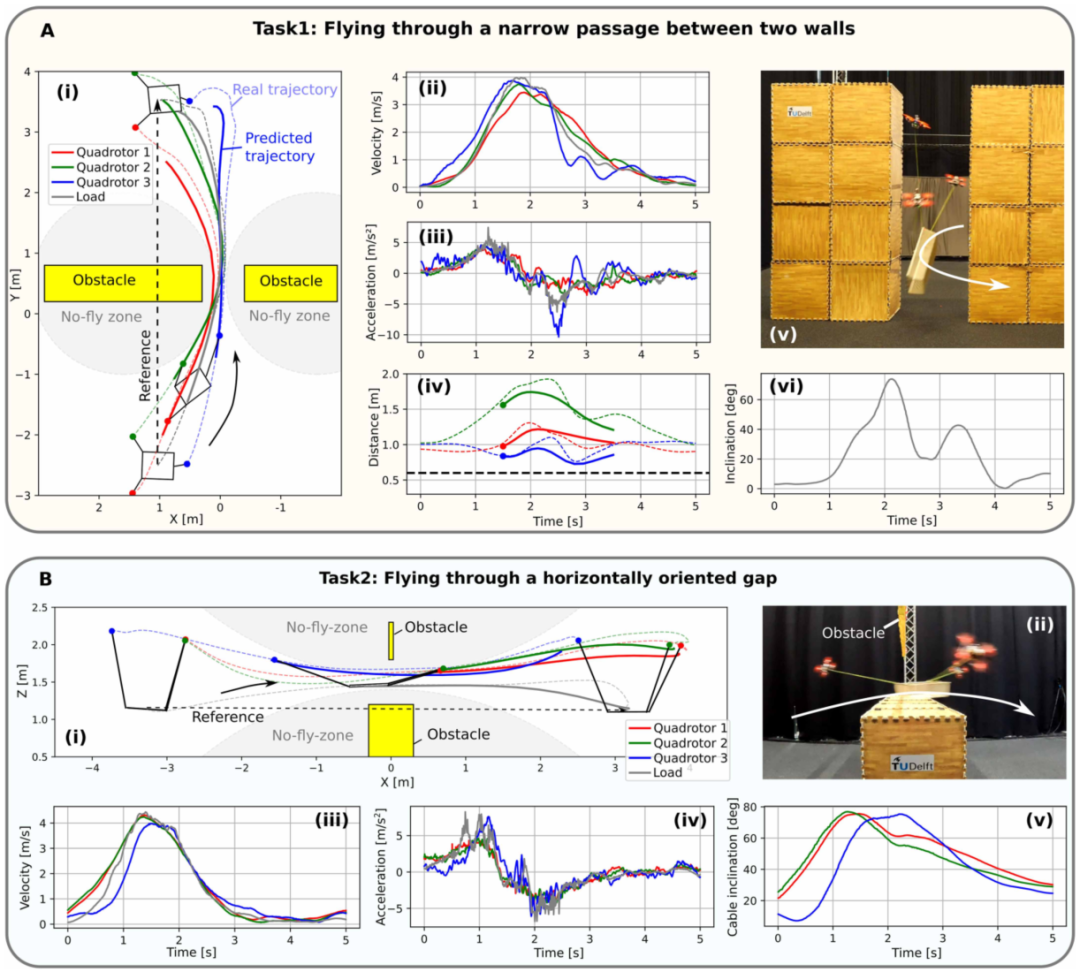
Figure 3:通过动态运动避开障碍物。这两项任务都提供了最初与障碍物相交的线段参考。 (A) 任务 1:穿过两堵墙之间的狭窄通道飞行。 (i) 负载中心和三个四旋翼飞行器的顶视图,其预测轨迹为 t = 1.5 s。 (ii 和 iii) 速度和加速度曲线。 (iv) 四旋翼飞行器之间的距离。 (v) 多重提升系统飞过狭窄通道时的实验快照。 (vi) 遍历过程中的负载倾角,定义为负载固定 z 轴与世界坐标系 z 轴之间的角度。 (B) 任务 2:穿过水平狭窄间隙飞行。 (i) t = 1.5 s 时轨迹和预测轨迹的侧视图。 (ii) 多重提升系统飞过水平间隙时的实验快照。 (iii 和 iv) 速度和加速度曲线。 (v) 穿越过程中的电缆倾斜度,定义为电缆方向与重力之间的角度。
Movie S2:动态避障实验(钻垂直/水平缝隙)
💪 实验3:鲁棒性测试
图4A是仿真对比:给负载质量、惯量、重心位置分别加上偏差。两种基线方法在质量误差20%时就开始抖,本文方法在误差50%时还能稳住。只有重心偏差10%时,姿态误差增加了约5度。
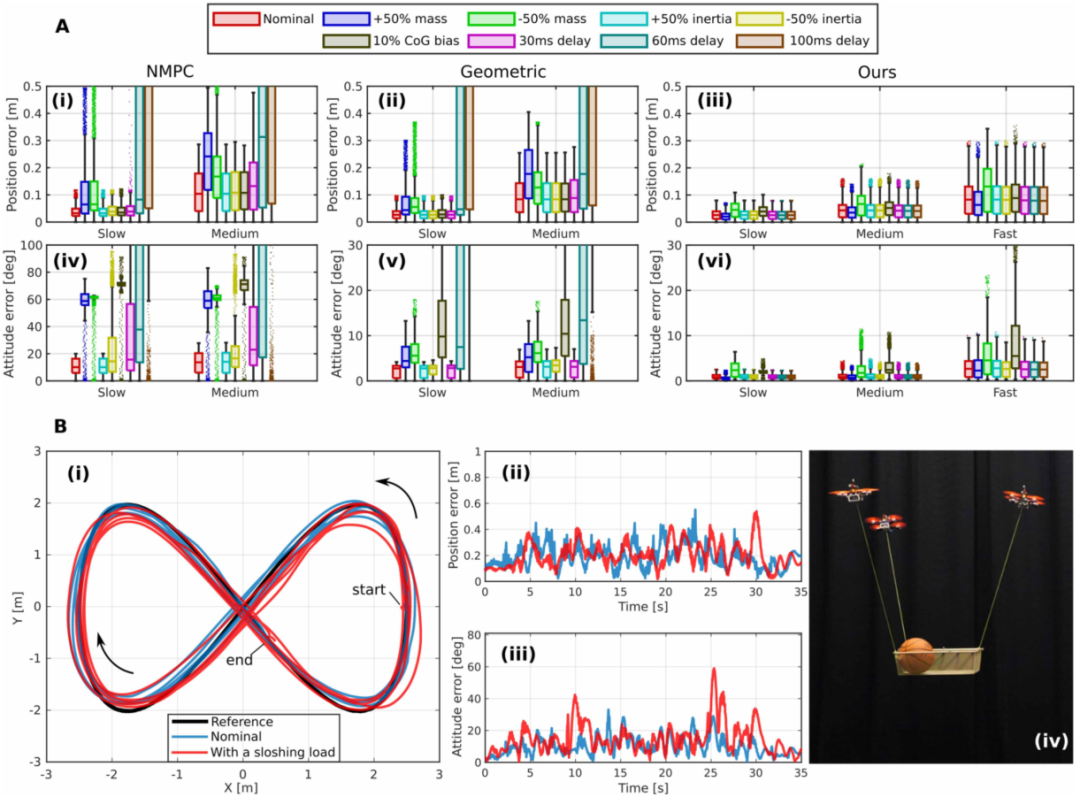
Figure 4:负载模型不确定性和通信延迟下的测试。 (A) 在各种负载模型不匹配和通信延迟下跟踪我们的方法与两种基线方法的性能,同时跟踪表 S1 中定义的慢速、中速和快速参考。即使没有不匹配,基线方法也未能遵循参考 Fast,而我们的方法仍然稳健。每个框对应一次运行,并总结 4500 个参考点的误差:中值(中心线)、第 25 至 75 个百分位数(框)以及延伸至最小和最大非异常值的须线;离群值定义为距离框边缘超出 1.5 四分位距 (IQR) 的点。 (i 至 iii) 位置误差以米为单位。 (iv 到 vi) 姿态误差以度为单位,通过轴角表示计算。 (B) 真实世界实验,其中将 0.6 公斤重的篮球放置在 1.4 公斤重的篮形负载上,并引入了相当大的负载惯性模型不匹配。我们的方法在不知道篮球存在的情况下运行。 (i) 有和没有晃动载荷的载荷 CoG 路径的俯视图。 (ii 和 iii) 位置和姿态跟踪误差的时间历史。 (iv) 实验快照。
图4B是真实实验:在负载里塞了个0.6公斤的篮球,让它自由滚动。这导致负载质量增加了43%,重心和惯量还在随时间变化。系统跟踪“Fast”轨迹,位置误差从0.197米增加到0.225米,姿态误差从12.9度增加到18.9度——但没炸。
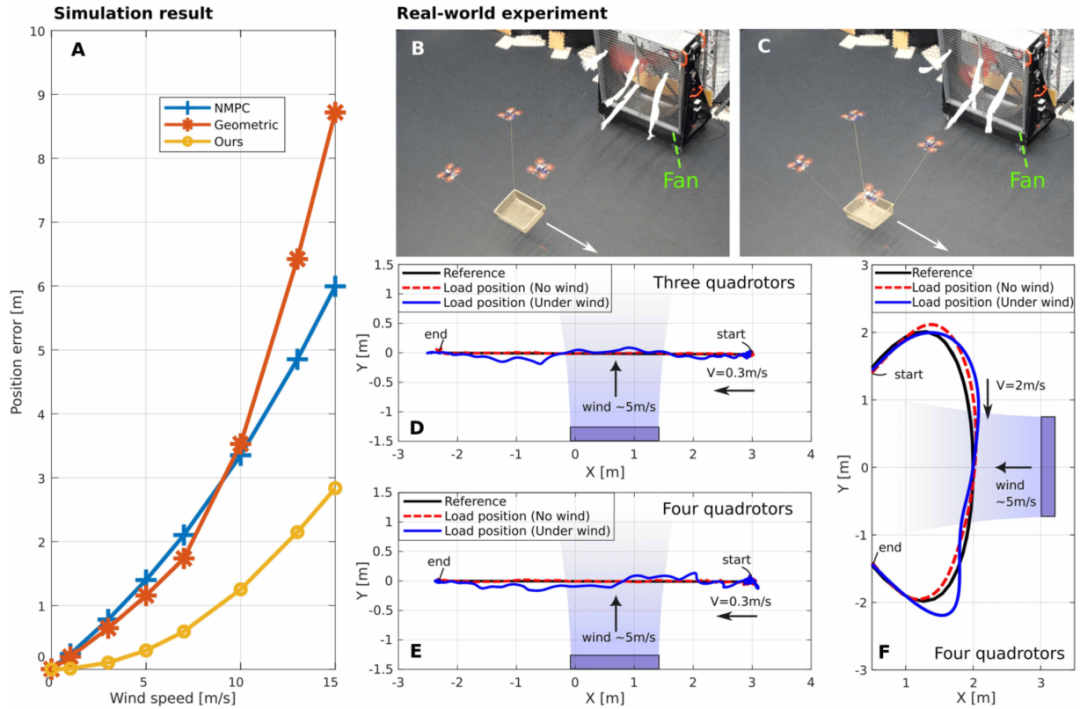
Figure 5:风扰动下的测试。 (A) 模拟环境中不同风速下我们的方法与基线方法之间的位置误差比较。 (B 和 C) 分别在 1.5 米直径风扇产生的大风条件下使用三个和四个四旋翼飞行器进行的实验快照。 (D 和 E)来自三到四个四旋翼飞行器的真实实验数据,这些四旋翼飞行器携带负载在 5 m/s 风场中以 0.3 m/s 的速度沿直线飞行。 (F) 四旋翼飞行器携带有效载荷并以 2 m/s 的速度沿曲线轨迹飞越风场的真实实验数据。实验视频在视频S4 中提供。
图5是抗风测试。仿真中风速从0升到15米/秒(图5A),本文方法的位置误差远小于基线。真实实验用直径1.5米的风扇吹出5米/秒的风(图5B-C),系统照样飞直线(图5D-E)和曲线(图5F)。
Movie S4:抗风实验(3机/4机)
图6是状态估计误差测试。给无人机的位置、姿态、速度加上随机游走噪声(图6C-E),级别4时,50秒后位置漂移0.07米、姿态漂移7度、速度漂移0.07米/秒。成功率还保持在95%以上(图6A)。真实实验中加了级别3的噪声,跟踪误差从0.197米增加到0.278米,姿态误差从12.9度增加到19.4度——系统照飞不误(图6B)。
Movie S5:状态估计误差下的飞行实验
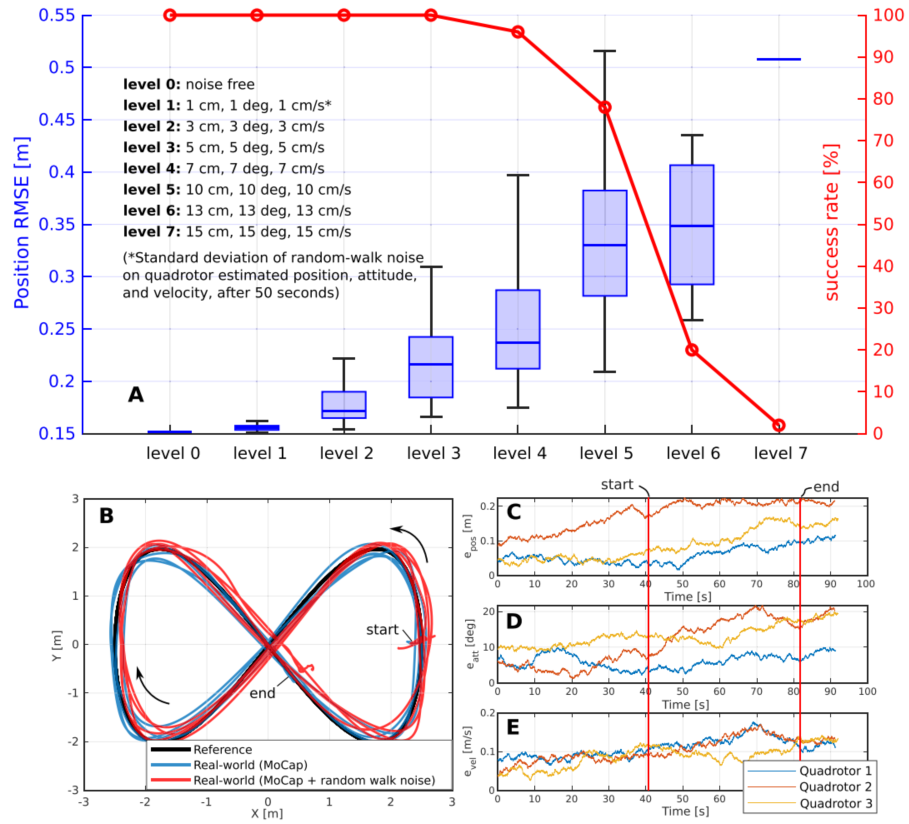
Figure 6:四旋翼状态估计误差下的测试。 (A) 在不同级别的状态估计噪声(每个级别 50 次运行)下进行蒙特卡洛评估,同时使用噪声位置、姿态和速度测量来跟踪快速参考。红色曲线显示成功率。箱线图仅总结了成功运行的负载位置 RMSE:中值(中心线)、第 25 至 75 个百分位数(方框)以及延伸至最小值和最大值的须线。 (B) 四旋翼状态估计误差下的真实飞行测试结果(3级)。我们在使用运动捕捉系统的原始四旋翼状态估计器上引入了随机游走噪声。(C 到 E) 本次飞行测试中引入的四旋翼飞行器位置、姿态和速度噪声的时间历史。
⏱️ 计算负载与可扩展性
图7A是三机实时飞行时规划器的CPU时间,平均15.3毫秒,只占10Hz周期(100毫秒)的15.3%。
图7B是仿真中增加无人机数量后的计算时间。指数增长,但在当前硬件(Intel i7-13700H)上,9机时仍能跑在10Hz以内。
图7C是9机仿真的结果:负载位置跟踪误差很小,机间距离始终大于安全阈值。
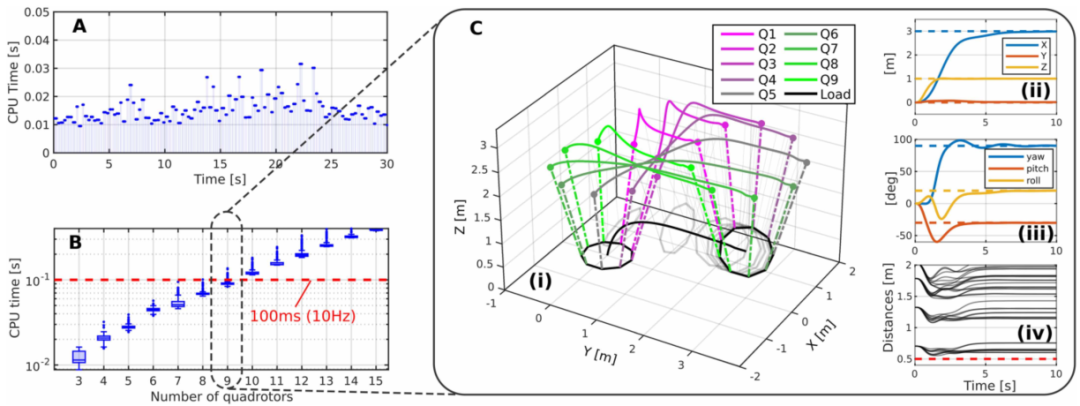
Figure 7:计算负载和可扩展性。 (A) 在实际实验中使用三个四旋翼飞行器求解每个 OCP 以快速遵循参考轨迹的 CPU 时间。(B) 在设定点控制任务中使用不同数量的四旋翼飞行器规划轨迹的 CPU 时间的箱线图。每个框对应于 200 个模拟步骤的数据:中值(中心线)、第 25 到 75 个百分位数(框)以及延伸到最小和最大非异常值的须线;离群值定义为距离框边缘超过 1.5 IQR 的点。 (C) 涉及九个四旋翼飞行器的设定点跟踪任务的仿真结果。 (i) 九个四旋翼飞行器的负载和 CoG 的 3D 图。(ii 和 iii) 负载位姿(实线)与参考位姿(虚线)相比的时间历史。(iv)四旋翼飞行器(黑色实线)和我们的算法允许的最小距离(红色虚线)之间的距离的时间历史。
Movie S3:4机协同飞行
03 创新点①从“控制”到“规划”的范式转变
传统方法用级联控制,假设负载比无人机慢。这个假设在低速时成立,高速时就不成立了。本文直接把整个系统的未来轨迹算出来,让无人机照着飞,不再分内外环。这个思路在单机敏捷飞行中已有应用,但在多机协同吊运中是第一次。
② 无传感器负载状态估计
不在负载上装任何传感器,全靠无人机自己的IMU和位置估算缆绳方向和负载位姿。核心是式14:用加速度计读数减去模型预估的推力和气动阻力,剩下的就是缆绳拉力,方向就是缆绳方向。这个想法很直接,但实现起来需要对推力模型和气动模型标得很准。
③ INDI对外力的即时补偿
传统控制器需要知道缆绳拉力才能算推力指令,但拉力取决于负载状态,有延迟。他们用INDI,直接用加速度计测量到的外力反馈,不管这个力是怎么来的,都能即时补偿。式15里那个f_ext就是从IMU实时算出来的。
④ 考虑推力限制的轨迹规划
不是事后检查推力有没有超限,而是在规划时就把式9作为约束加进去。这样生成的轨迹天然就是可飞的。图2B的实验很说明问题:推力一限制,规划器自动让轨迹变缓,不会硬飞导致炸机。
⑤ 对模型误差的强鲁棒性
图4A和4B很直观:50%质量误差、滚动的篮球、5米/秒的侧风,系统都不炸。这得益于几个设计的叠加:规划器用了整体模型但允许偏差、INDI补偿了未知外力、估计器融合了多种测量。单拎出任何一个都可能扛不住,合在一起就稳了。
04 总结与展望这个工作给人的感觉是:把多机吊运从“实验室慢慢飞”推到了“能干活的速度”。5米/秒、8米/秒²,已经接近商用无人机本身的性能上限。动态避障、无传感器估计、强鲁棒性,这些加在一起,让这个技术离实际应用近了一大步。
从方法论上看,这个“轨迹规划+INDI跟踪”的框架可以推广到其他有动力学耦合的多机器人协同问题。核心思想是:不依赖内外环分离假设,直接算整体轨迹,然后用传感器即时补偿不确定性。
未来研究将聚焦于以下几个方向:
🔸 更紧的鲁棒性约束:现在低估负载质量可能导致推力超限。可以用鲁棒MPC,给不确定量留裕度,或者在线估计负载惯量(已有工作做这个),实时更新规划器的模型。
🔸 机载感知与协同定位:GPS拒止环境下,需要多机协同SLAM。难点是高速飞行时各机坐标系的快速对齐。最近有一些基于时序一致性的方法(如TCAFF),可能能用上。
🔸 更复杂的障碍物环境:目前用简单的圆柱/球体表示障碍物。如果要在森林、建筑工地里飞,需要结合稠密建图和实时规划,计算压力会大很多。
🔸 人机协同:如果有一个操作员想远程操控负载,同时系统还要自动避障,怎么融合人的指令和自动规划?这是个控制共享的问题。
🔸 多任务协同:9机仿真已经能跑,但如果要同时吊多个负载,或者部分机器人在吊东西、部分在拍照,任务分配和规划会复杂得多。
🔸 硬件轻量化:目前的规划器跑在笔记本上。如果能移植到机载计算机(比如Jetson Orin),就可以完全脱离地面站,实现全自主集群。
从3机到9机,从实验室到风场,这个框架证明了一件事:多机吊运可以既快又稳。下一步,是让它去真的救灾现场、建筑工地试试。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。