英文题目:A Joint-Space Humanoid Robot Torso Motion Planning Method Based on Spiking Neural Networks
中文题目:基于脉冲神经网络的仿人机器人关节空间躯干运动规划方法
作者:Fengjia Ju, Hongzhe Jin, Hong Yin, Jiaxiu Liu, Xiuli Zhang, Mingguo Zhao, Jie Zhao
作者单位:哈尔滨工业大学机电工程学院;北京交通大学机械、电子与控制工程学院;清华大学自动化系
期刊:IEEE/ASME Transactions on Mechatronics
发表时间: 2026年4月
引文格式:Ju F., Jin H., Yin H., Liu J., Zhang X., Zhao M., and Zhao J., A Joint-Space Humanoid Robot Torso Motion Planning Method Based on Spiking Neural Networks, IEEE/ASME Transactions on Mechatronics, vol. 31, no. 2, pp. 1377–1387, 2026.
01 全文速览
人类在完成搬运、支撑、转向、伸手等动作时,并不是只靠手臂完成任务。很多时候,躯干会主动前倾、侧弯或旋转,从而扩大手臂可达空间、降低用力负担,并让头部视觉系统获得更合适的观察角度。
这篇论文的核心问题正是:仿人机器人能不能像人一样,学会在双臂操作中自然地使用躯干?
作者提出了 TMPNet(Torso Motion Planning Network),通过模仿学习从人体骨架关键点中学习躯干—双臂的运动关系,再利用脉冲神经网络 SNN 在类脑芯片上实现低功耗推理。与传统逆运动学方法相比,TMPNet不仅能提高双臂操作灵活性,还能补偿头部自由度,减少突变式大角度运动和高迭代计算成本。
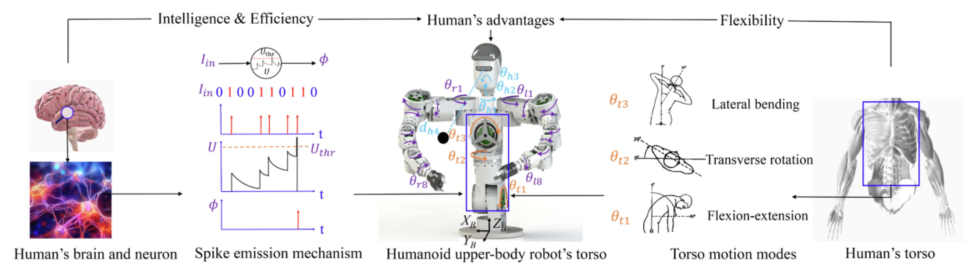
图1:仿人上半身机器人及其受人类躯干优势启发的结构设计。
✅ 亮点1:从人体示范中学习躯干与双臂之间的运动协同关系。
✅ 亮点2:提出几何映射模型,将人体骨架关键点转化为机器人躯干关节角。
✅ 亮点3:将SNN部署在类脑芯片上,实现低功耗边缘计算。
✅ 亮点4:结合解耦逆运动学与可变弹簧阻尼模型,兼顾柔顺性、准确性与平滑性。
02 研究内容
🎯 2.1 为什么躯干运动规划重要?
传统仿人机器人双臂操作中,躯干常被预先固定,或者只作为逆运动学中的冗余关节参与求解。这种处理方式虽然简单,但很难真正发挥躯干的作用。人类在操作时,躯干会根据手臂目标位置自然调整姿态,使手臂处于更舒适、更灵活的区域。
已有方法如DLS、KDL、Bio-IK等能够求解逆运动学,但往往存在三类问题:一是躯干运动缺少人体经验引导;二是优化迭代或随机采样可能带来计算成本;三是容易出现突然的大角度变化。本文希望用模仿学习 + 模型方法的思路解决这个问题。
🧠 2.2 机器人模型:23自由度上半身系统
论文中的仿人上半身机器人共有23个自由度,包括3自由度躯干、左右各8自由度手臂,以及4自由度头部视觉系统。其运动学可写为:
其中,( heta) 表示机器人关节角,(X) 包含左右臂末端位置姿态和头部视线点。传统速度级逆运动学为:
为了独立规划躯干,作者将关节速度分为躯干部分



这个式子的关键是:躯干运动由TMPNet单独规划,双臂和头部再通过解耦逆运动学补偿躯干带来的影响。这样既能让躯干主动参与运动,又不破坏末端轨迹跟踪。

图2:完整运动规划框架。左侧为TMPNet学习躯干运动,右侧为模型驱动解耦逆运动学,体现学习引导 + 模型保证的整体思路。
🧩 2.3 数据构建:从人体骨架关键点到机器人躯干关节
TMPNet的训练数据来自两部分:一是作者通过ZED2相机采集的60组人体搬运动作,共12988组骨架关键点;二是NTU RGB+D公开数据集中提取的10000组人体动作样本。
难点在于,人体骨架关键点是笛卡尔空间数据,而机器人需要的是躯干关节角。为此,作者建立了几何映射模型,选取人体躯干和肩部相关关键点,将人体躯干姿态映射为机器人三个躯干关节角:前屈/后伸、侧弯、旋转。

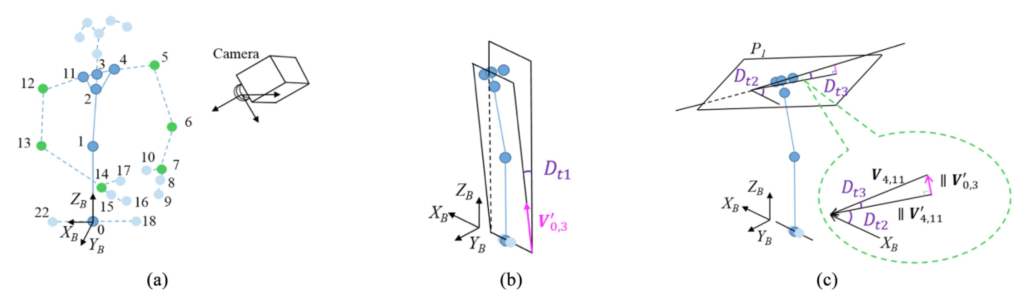
图3:人体示范采集、骨架关键点、几何映射模型及映射结果。
为了提高极限姿态下的泛化能力,论文还采用线性插值、线性外推和绕竖直轴旋转的数据增强方法。增强后的数据显著增加了躯干极限角度附近的样本,从而让TMPNet在大范围操作时更稳定。
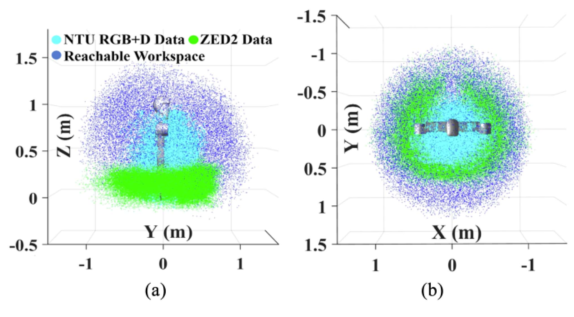
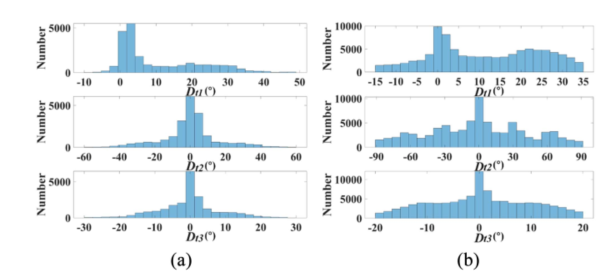
图4:输入特征在笛卡尔空间中的分布,以及增强前后躯干关节角分布。
⚙️ 2.4 SNN如何用于连续运动规划?
SNN通常更适合事件驱动和低功耗计算,但本文将其用于回归任务:根据双臂关键点位置预测躯干关节角。作者为三个躯干关节分别设计一个SNN,每个网络独立回归一个躯干角:
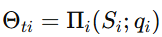
其中,(S_i) 是根据双臂关键点人工提取的输入特征,

这部分的意义在于:TMPNet不是简单用神经网络替代逆运动学,而是只学习人体经验中的躯干运动策略,再由模型方法完成高精度末端跟踪。因此,它比纯模型方法更有动作经验,也比纯学习方法更容易保证精度。
🛠️ 2.5 VSDM:让SNN输出更平滑
由于相机采集的人体数据存在噪声,SNN直接输出的躯干角可能出现波动。同时,网络输出的是关节角,而解耦逆运动学需要关节速度。为此,作者引入 可变弹簧阻尼模型 VSDM:

它相当于在SNN输出后加了一个物理滤波与动态约束模块,将目标角度转换为平滑的关节角和角速度。论文还通过动态调整自然频率 (omega),抑制启动阶段的速度超调和角度突变。
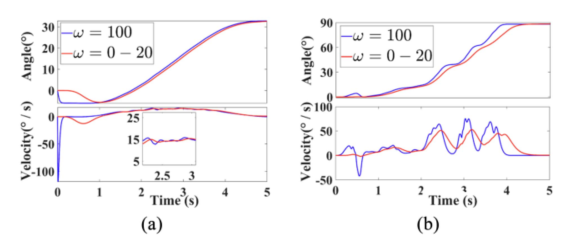
图5:不同 (omega) 取值下躯干角与角速度变化。
03 实验结果
论文将TMPNet与DLS、WDLS、KDL-RR、Bio-IK等方法进行对比。评价指标包括双臂可操作度、头部关节总位移、伪逆计算次数,以及是否出现突然大角度变化。
在极限位姿仿真中,TMPNet能够让躯干角接近关节极限,如第一躯干关节达到32°以上,第二躯干关节接近88°,第三躯干关节接近19.5°,说明其在极端动作下仍具备较好泛化能力。
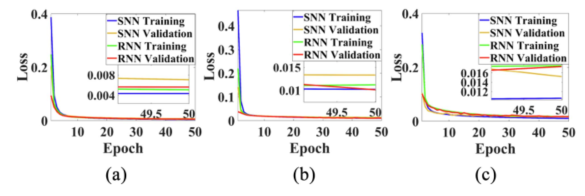
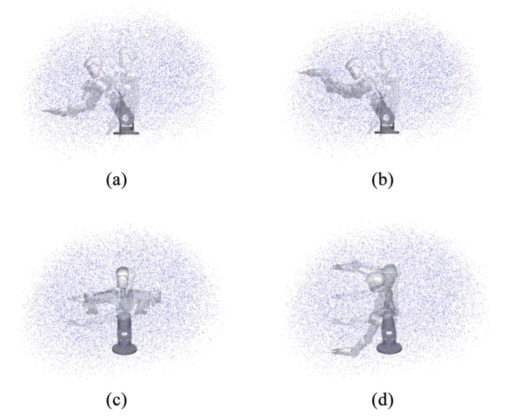

图6:SNN与RNN训练损失对比,以及极限姿态下的机器人运动、躯干角、可操作度和跟踪误差。
在搬箱任务中,TMPNet能够更自然地利用第二躯干关节完成侧向搬运,同时减少头部关节运动,使视觉系统保持更宽视野。相比KDL-RR和Bio-IK,TMPNet没有依赖随机采样,因此避免了突然大角度跳变;相比DLS和WDLS,TMPNet的躯干运动更有人类经验引导,双臂灵活性更好。
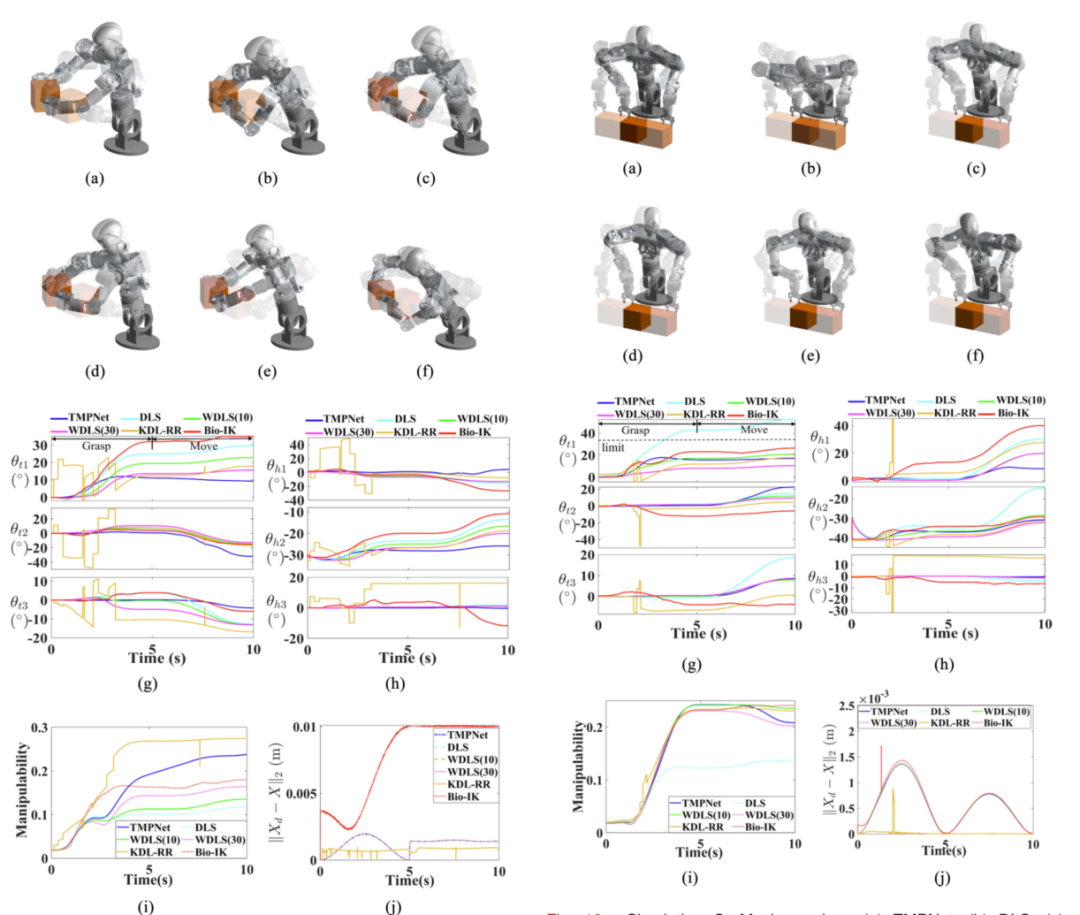
图7:两组搬箱仿真任务对比,包括不同方法下的机器人姿态、躯干角、头部角、可操作度和跟踪误差。
最后,作者在真实机器人上完成了四类双臂协作实验,包括搬箱、转动方向盘、向下移动板件、将板件从前方移动到左侧。在大范围实验中,躯干第一关节和第二关节分别达到28.2°和89.5°,验证了TMPNet在真实系统中的可用性。
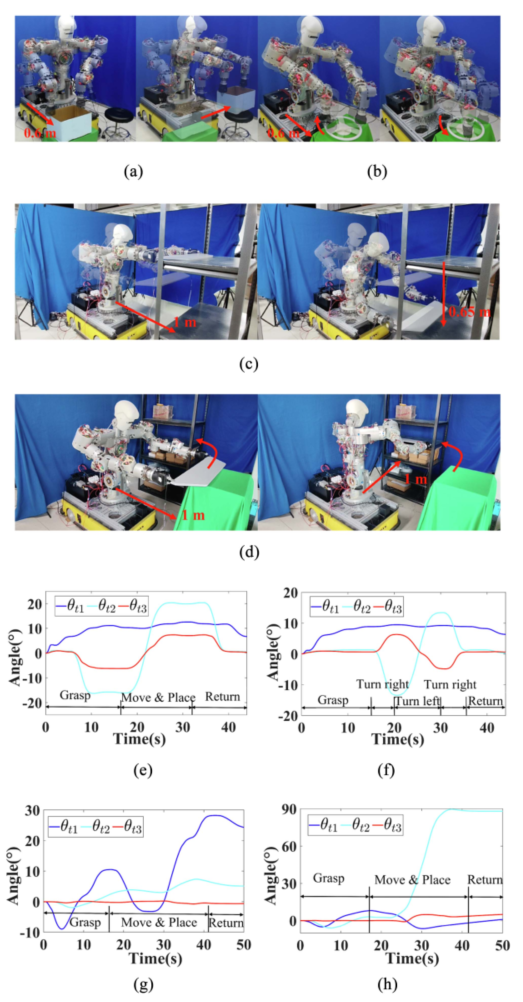
图8:真实机器人实验及躯干关节角变化。
04 总结与展望
这篇论文的价值在于,它没有把仿人机器人躯干当作简单冗余关节,而是将其视为一种可以从人体经验中学习的协同运动资源。TMPNet通过SNN学习躯干—双臂关系,再结合解耦逆运动学保证末端跟踪精度,最后利用VSDM提升运动平滑性,形成了一个比较完整的类脑学习 + 模型控制框架。
未来研究可进一步关注:
1. 将上半身机器人与移动底盘结合,扩展更大工作空间;
2. 在多约束场景下进一步发挥VSDM的约束处理能力;
3. 将躯干规划与全身平衡、视觉主动感知、双臂力控结合;
4. 探索SNN在更复杂仿人机器人运动控制中的低功耗优势。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。