英文题目:Multi-robot collaborative obstacle avoidance based on hierarchical path planning methods
中文题目: 基于分层路径规划方法的多机器人协同避障
作者:Yanjuan Wu, Hui Li
作者单位: 天津理工大学
期刊:Engineering Applications of Artificial Intelligence(IF 8.0中科院一区,JCR一区)
发表时间:2026年1月1日
链接:https://doi.org/10.1016/j.engappai.2025.112796
引文格式:Wu Y, Li H. Multi-robot collaborative obstacle avoidance based on hierarchical path planning methods[J]. Expert Systems With Applications, 2026, 298: 129712.
01 全文速览多机器人系统在仓库、车间里协同工作时,最头疼的问题之一就是路径冲突——几个机器人在路口相遇,谁先走?谁让谁?处理不好就堵成一团,甚至死锁。
现有的方法各有短板:全局规划算法(如A*、JPS)能找最短路径,但遇到动态障碍就抓瞎;局部避障算法(如DWA)反应快,但容易陷入局部最优;优先级策略能协调冲突,但往往依赖静态设定,适应性差。
天津理工大学这篇工作提出了一套分层路径规划框架,把问题拆成三层来解决:
全局层:改进的跳点搜索算法,引入安全距离约束和角度优先搜索,生成兼顾安全与效率的全局路径
中间层:构建三维时空网格模型,把机器人和障碍物的轨迹投影到时空域,提前预测潜在冲突
局部层:动态窗口法(DWA)结合动态优先级机制,实现实时避障和有序协调
仿真结果显示,改进的JPS算法比传统A*路径长度缩短13%,转折点减少50%,计算时间降低89%;在冲突协调阶段,多机器人能根据优先级动态调整,实现无碰撞运行。
核心亮点:
✅分层架构:全局规划+时空预测+局部协调,各司其职
✅三维时空图:在时间和空间两个维度预测冲突,比传统2D方法更精准
✅动态优先级:根据任务紧急程度实时调整,避免固定优先级导致的死锁
✅高效全局规划:改进JPS算法,路径更短、转折更少、计算更快
✅完备验证:单机器人动态障碍、多机器人静态/动态环境全覆盖
02 研究内容🧩问题描述:多机器人系统的三类冲突
在复杂动态环境中,多机器人系统可能遇到三类冲突:机器人撞上静态障碍、撞上动态障碍、以及机器人之间互撞。机器人之间的冲突又可以分为两种:
对向冲突:两个机器人同时到达路径交叉点,谁先过?
侧向冲突:两个机器人在某段路径上反向而行,会车时可能擦撞
传统二维路径规划只考虑空间位置,没法刻画时间维度的冲突。比如两个机器人路径交叉,但如果到达时间错开,其实不会撞。这就需要引入时间维度。
📐全局层:改进的JPS算法
全局规划的任务是为每个机器人找一条从起点到终点的最优路径。他们选了跳点搜索算法作为基础,因为JPS比A*更快——它通过“跳点”机制大幅减少了需要扩展的节点数。
但JPS有两个问题:一是规划的路径可能离障碍太近,不够安全;二是在对角线移动时,搜索方向可能不高效。他们针对这两点做了改进:
改进一:启发函数加入安全距离约束

其中新增的

是距离衰减项,让路径尽量远离障碍;P是危险节点惩罚项,避免路径穿过高风险区域。
改进二:角度优先搜索
传统JPS按固定顺序(上下左右)扩展节点,效率不高。他们根据当前点与目标点的夹角,动态调整搜索优先级:

如图3所示,算法计算从当前点到目标点的方向角θ,然后优先搜索最接近这个方向的三个网格,其他方向延后。这大大减少了无效的节点跳转。
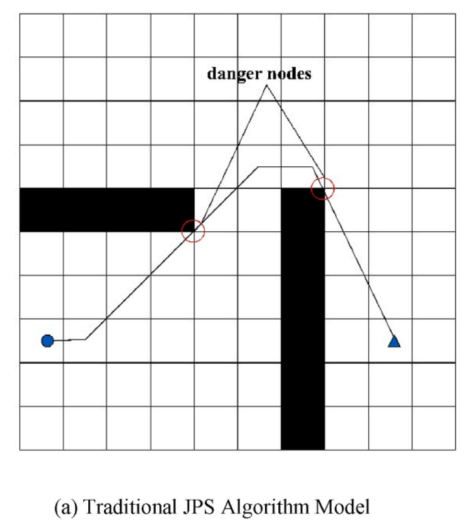
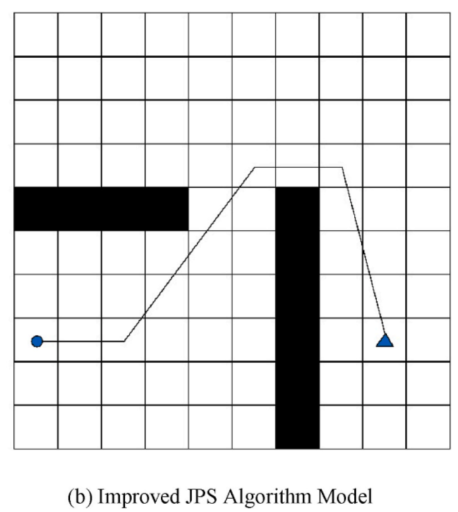
Figure 1:模型改进对比图
图1对比了改进前后的路径效果,改进后的路径更平滑,离障碍物更远。
Figure 2:角度搜索和预测角示意图
图2展示了理想路径l和实际路径l的关系,以及角度优先搜索的基本思想。
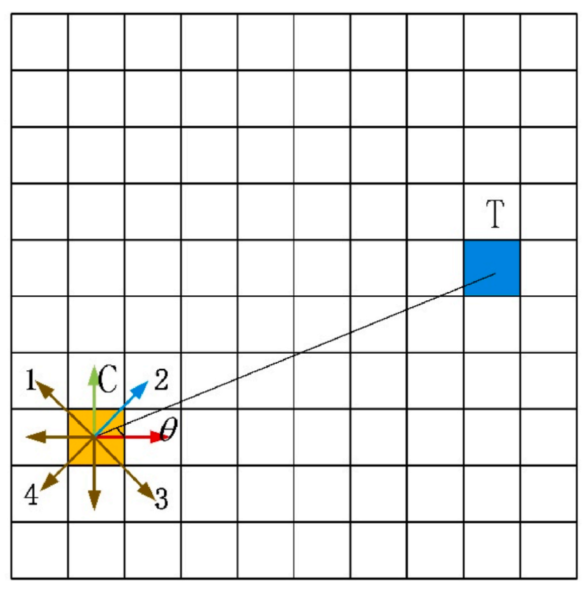
Figure 3:角度优先搜索示意图
图3详细说明了如何根据当前点C到目标点T的夹角θ来确定8个方向的搜索优先级。
🕒中间层:三维时空冲突预测
有了全局路径,还需要预测冲突。他们把传统二维网格扩展成三维时空网格——多了一个时间轴

。
每个机器人的轨迹在时空域里是一条曲线。如果两条曲线相交,说明两个机器人在同一时刻到达同一位置,这就是冲突。
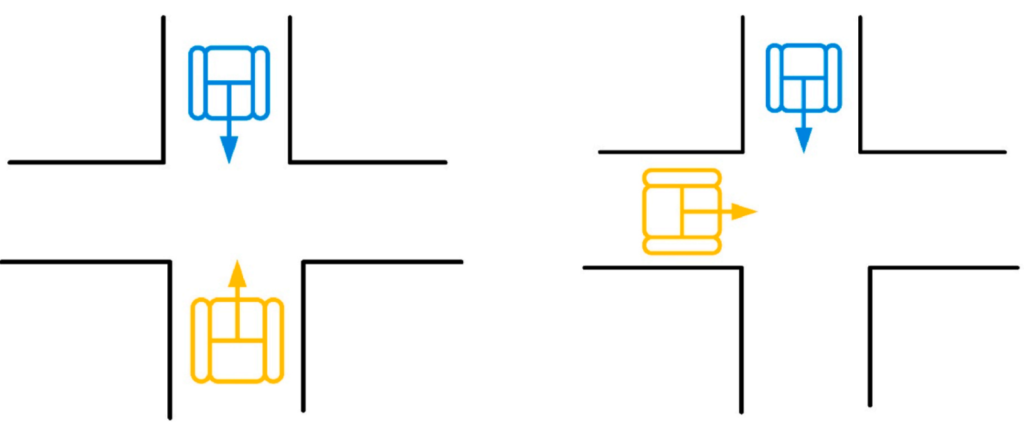
Figure 4:二维空间多机器人冲突类型图
图4画出了二维空间里对向冲突和侧向冲突的典型场景。
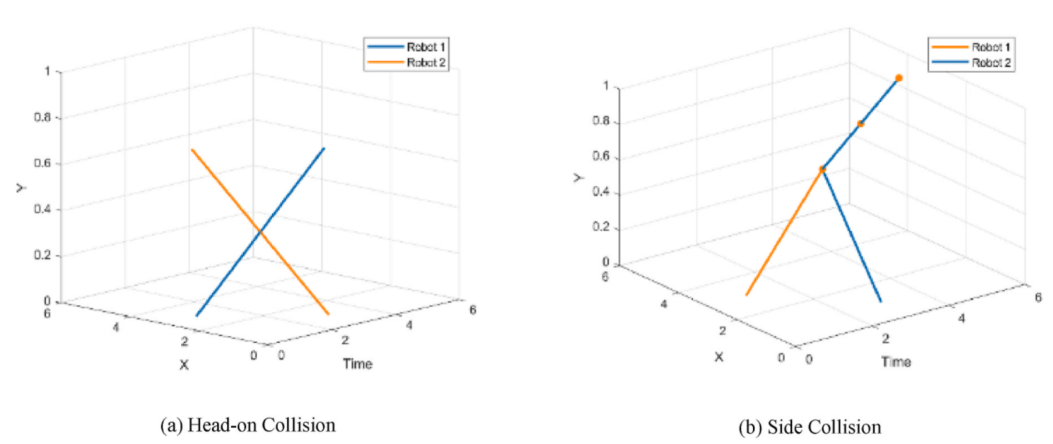
Figure 5:三维时空图中多机器人冲突类型图
图5把同样的场景画到三维时空图里,冲突点一目了然——路径交叉不一定有冲突,还要看时间是否重合。这种表示比二维更精准。
🏃 局部层:DWA算法+动态优先级
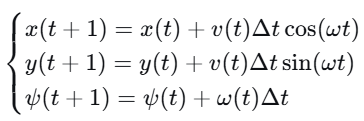
预测到冲突后,就需要局部调整。他们用动态窗口法做实时避障。DWA的核心是在速度空间里采样,用评价函数选最优轨迹。
机器人的运动学模型:
速度采样受三方面约束:
- 速度极限 Vm
- 加速度极限 Vd
- 制动距离约束 Va
可行速度空间是三者交集:

评价函数:

其中 head衡量方向偏差,dist衡量离障碍距离,vel鼓励高速,h(n)是剩余距离启发项。
优先级策略:
当检测到冲突时,低优先级机器人减速或暂停,高优先级机器人正常行驶。优先级不是固定的,而是根据任务紧急程度、距目标距离、冲突频率等动态调整。
第i个机器人因协调产生的延迟时间:
其中C_i是冲突次数,

是高优先级机器人通过时间,

是加减速额外耗时。
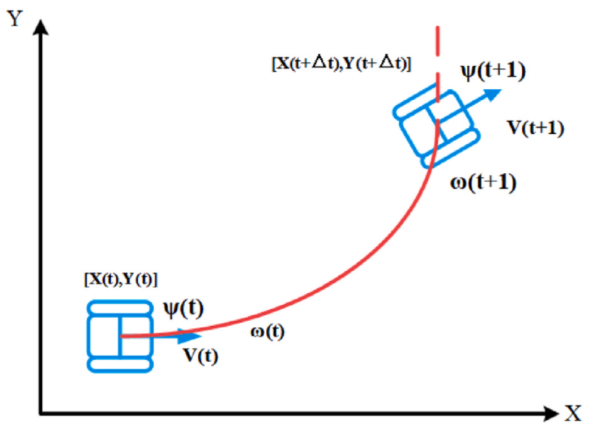
Figure 6:移动机器人运动学模型图
图6画出了机器人在XY平面内的运动学模型,标明了位置、航向角、线速度、角速度。
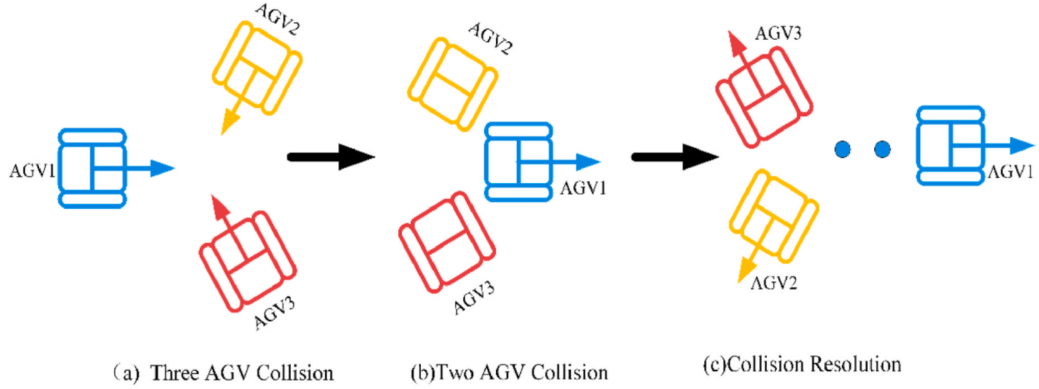
Figure 7:优先级策略示意图
图7用三个AGV的例子演示了优先级策略:AGV1 > AGV2 > AGV3。在路口相遇时,AGV2和AGV3等待,AGV1先过;然后AGV3等待,AGV2再过;最后AGV3通过。整个过程有序无冲突。
🔁 算法流程
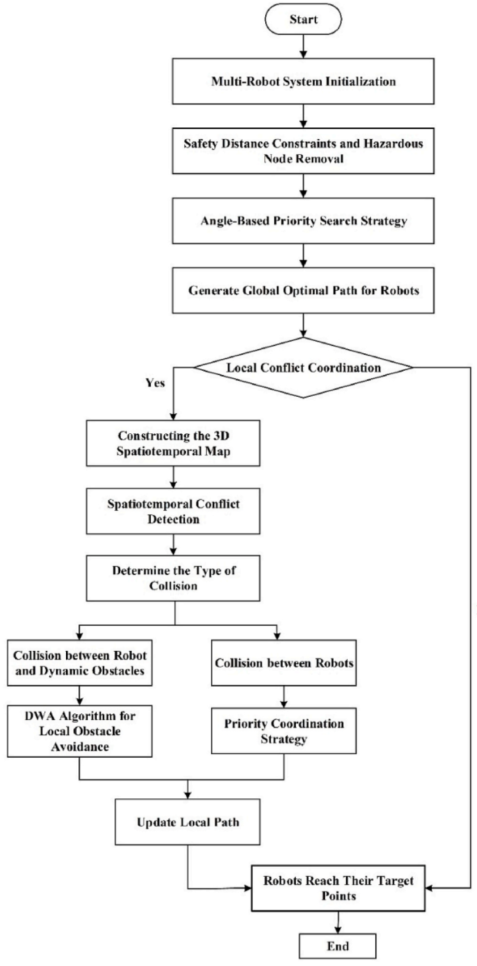
Figure 8:算法流程图
图8是整个分层规划算法的流程图:
1. 改进JPS生成全局路径
2. 优化路径(去除危险节点和冗余节点)
3. 构建三维时空图,检测冲突
4. 有冲突?→ 根据冲突类型和优先级协调
5. 无冲突?→ 执行任务
6. 遇到动态障碍?→ DWA局部重规划
7. 否则继续沿路径移动,直到任务完成
💻仿真验证
单机器人实验:
在20X20栅格地图上随机生成障碍,改进JPS总能找到可行路径,成功率100%。
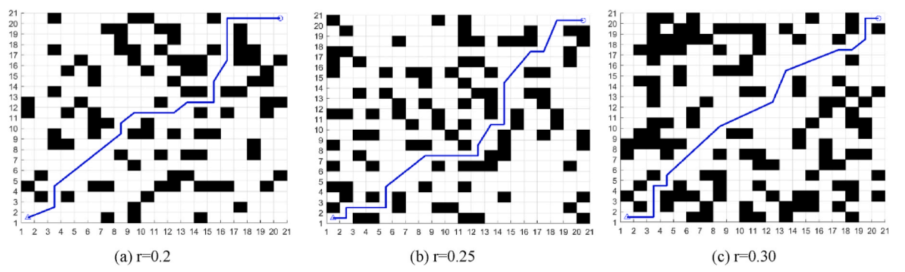
Figure 9:20x20随机障碍地图路径规划图
图9展示了三种不同障碍比例下的规划结果。
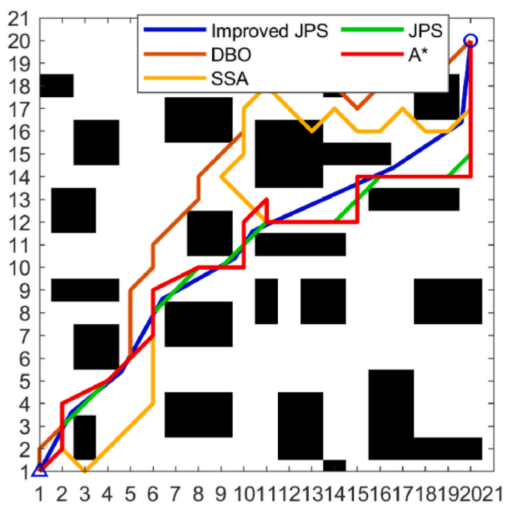
Figure 10:100x100地图各算法路径对比图
图10是大规模100X100地图上A*、JPS、改进JPS的路径对比。改进JPS的路径明显更短、转折更少。
表1 100x100地图各算法路径规划结果数据

改进JPS比A*路径长度缩短13%,转折点减少50%,搜索节点减少74%,时间降低89%;比原版JPS路径缩短8%,转折点减少36%,搜索节点减少50%,时间降低49%。
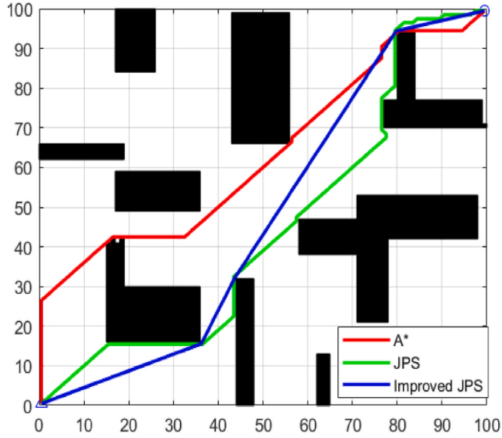
Figure 11:20x20地图各算法路径对比图
图11是20x20地图上A*、JPS、改进JPS、DBO、SSA的对比。改进JPS依然最优,而两种生物启发算法(DBO、SSA)路径更长、转折更多、计算时间也长得多。
单机器人动态障碍验证:
引入一个移动的动态障碍,用三维时空图预测冲突。图12显示机器人和障碍在 (14.5, 1) 位置、13.5秒时同时到达,有冲突风险。局部调整后成功避开。
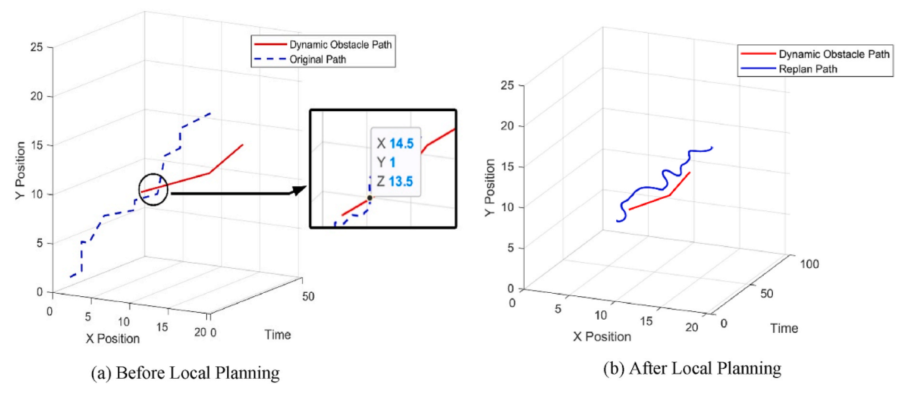
Figure 12:单机器人时空冲突验证图
图12a是原路径的时空图,图12b是调整后的时空图,冲突点消失了。
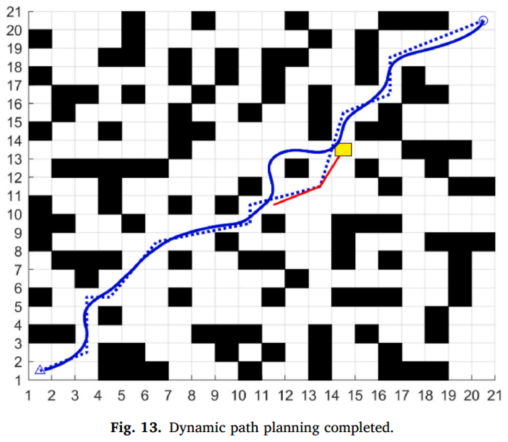
Figure 13:动态路径规划完成图
图13是最终在二维地图上的路径,成功绕过动态障碍。
多机器人实验:
静态环境:
三台机器人(AGV1、AGV2、AGV3)优先级递减。图14是二维地图上的全局路径,图15是三维时空图。
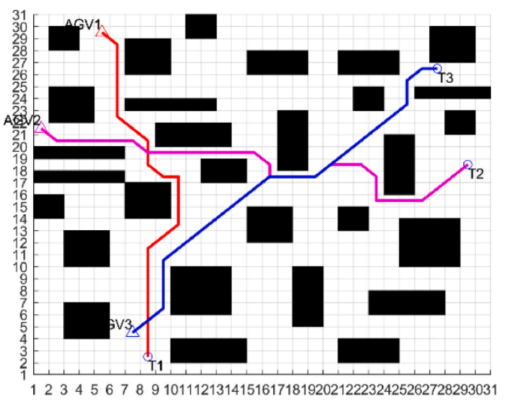
Figure 14:二维地图多机器人路径规划图
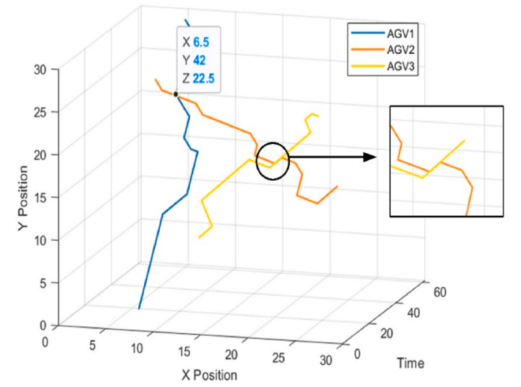
Figure 15:静态环境多机器人时空冲突图
在42秒时,AGV1和AGV2同时到达 (6.5, 22.5),之后路径不再重叠——这是对向冲突。AGV1优先通过,AGV2等待安全时机再进入。同时AGV2和AGV3也有路径重叠——这是侧向冲突。AGV2优先通过,AGV3局部避让。最终三台机器人无碰撞抵达目标。
动态环境:
引入三个动态障碍和三个未知静态障碍。图16是三维时空图,可以看到机器人和动态障碍的路径交点。AGV1和AGV3分别与动态障碍有潜在冲突,需要局部调整;AGV2的路径被未知静态障碍挡住,需要局部重规划。
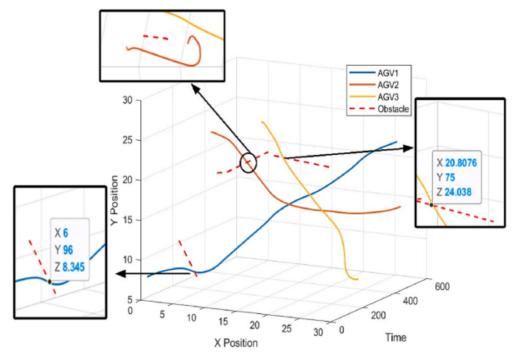
Figure 16:动态环境多机器人时空冲突图
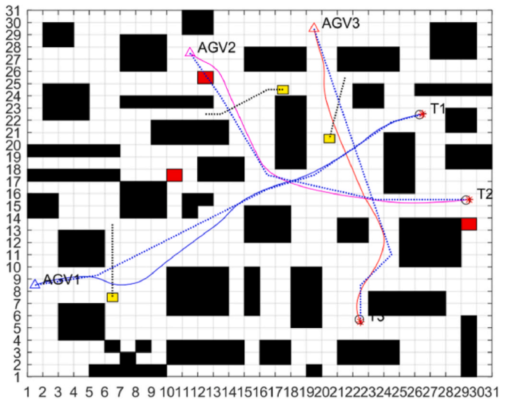
Figure 17:动态环境多机器人最终路径图
图17是最终结果,三台机器人成功避开所有动态和静态障碍,无碰撞完成任务。
03 创新点① 分层架构的清晰分工
全局层保证路径最优,中间层预测冲突,局部层实时避障——三层各司其职,没有耦合。这种设计比单层规划更灵活,比两层规划(全局+局部)多了预测能力,可以提前规避而不是撞上再躲。
② 三维时空冲突预测
把时间维度加进冲突检测,是这篇工作最核心的改进。传统二维方法只看路径是否交叉,会误判很多实际不冲突的情况(比如错时通过)。三维时空图直接显示路径-时间曲线,只有时空都重合才算冲突,准确率高得多。
③ 改进JPS的双重优化
启发函数加入安全距离约束,让路径自动远离障碍;角度优先搜索让扩展方向更智能。表1的数据很直观:路径更短、转折更少、搜索节点大幅减少、时间缩短近90%。这不是微调,是量级的提升。
④ 动态优先级策略
固定优先级会导致低优先级机器人永远吃亏,甚至饿死。动态优先级根据实时状态调整,既保证有序,又避免死锁。延迟时间 (T_{ ext{delay}i}) 的定义量化了协调代价,为系统级优化提供了依据。
⑤ 完备的验证体系
机器人+多机器人、静态+动态障碍、二维+三维可视化、定量指标+定性图示——这套验证覆盖了所有可能场景。特别是多机器人动态环境实验,同时处理三种冲突类型(机器人-静态障碍、机器人-动态障碍、机器人-机器人),复杂度很高,还能无碰撞完成,说明方法鲁棒性好。
04 总结与展望这篇工作的价值在于把预测和协调做在了冲突发生之前。传统方法往往是“撞上了再躲”,而三维时空图让系统能提前看到未来几秒的潜在冲突,主动调整。
从工程落地角度看,这套框架对算力要求不算高——全局规划一次4秒内完成,局部DWA是轻量级算法,动态优先级只需局部通信。在烟台港的实车验证(虽然是另一篇论文,但类似场景)说明这类方法确实能跑通。
未来研究将聚焦于以下几个方向:
🔸 更复杂的障碍物建模:目前障碍物用矩形和圆形近似,遇到任意形状时可以用凸包分解,关键是要保持势场连续可微。
🔸 执行不确定性建模:实际车的跟踪有误差,简单做法是在窄通道放一个“风险场”,把不确定性折合成代价;复杂做法是用随机微分方程建模。
🔸 多机协同调度:如果几十上百台机器人同时运行,路径规划还要考虑全局调度。这需要在度量里加上时变的其他机器人位置,变成时空联合优化。
🔸 与学习结合:A*给的初值有时绕远,如果能从历史数据中学习“典型路径”,直接给一个更好的初值,可以进一步减少迭代次数。
🔸 对抗攻击的鲁棒性:如果部分机器人被攻击、发送虚假位置,如何保证系统仍然安全?可能需要引入信誉机制或一致性检验。
🔸 硬件在环验证:目前停留在仿真,下一步可以在真实AGV上跑跑看,特别是通信延迟、定位误差对三维时空图预测精度的影响。
从仿真到实车,从单机到多机,这条路还有不少坑要填。但至少,他们证明了“提前预测、有序礼让”是走得通的。