论文信息
英文题目:Geodesic-based path planning for port transfer robots on Riemannian manifolds
中文题目: 基于黎曼流形测地线的港口转运机器人路径规划
作者:Runjiao Bao, Junzheng Wang, Shoukun Wang
作者单位: 北京理工大学自动化学院
期刊:Expert Systems With Applications(IF 7.5中科院一区,JCR一区)
发表时间:2026年3月1日
链接:https://doi.org/10.1016/j.eswa.2025.129706
引文格式:Bao R, Wang J, Wang S. Geodesic-based path planning for port transfer robots on Riemannian manifolds[J]. Expert Systems With Applications, 2026, 298: 129706.
01 全文速览港口里那些搬运汽车的机器人,每天在堆场里穿行,50%以上的时间都花在路上。怎么让它们走得更快、更稳、更安全,是个实实在在的工程问题。
现有的路径规划方法各有各的短板:搜索式的A路径不平滑,采样式的RRT不一定收敛,优化式的容易卡在局部最优,学习式的要求太多训练数据。北理工这篇工作换了个思路——他们把路径规划问题放到黎曼流形上去解。
核心思想挺直观:在常规的欧氏空间里,最短路径是直线;但在一个经过特殊设计的弯曲空间里,最短路径(测地线)会自动满足运动约束、避开障碍物、还保证平滑。关键就在于怎么设计这个空间的“弯曲方式”——也就是黎曼度量。
他们把这个度量拆成三部分:非完整约束让机器人不能横着走,转向代价避免急转弯,障碍物势场把障碍物“顶”成高能量区域。这样一来,求最短路径的过程就等价于解一个几何热流方程,得到的路径自然就兼顾了可行性、平滑性和安全性。
仿真和实车实验在烟台港做了验证,跟A、RRT、Hybrid A对比,路径可行性接近100%,最小障碍物距离比其他方法高出25%以上,单次规划时间控制在4秒以内。
核心亮点:
✅ 几何直觉:把多约束规划问题统一成流形上的测地线求解
✅ 复合度量:运动约束+转向代价+障碍势场,统一编码
✅ 方法兼容:A初值+几何热流迭代,收敛快且稳定
✅ 实车验证:烟台港真实场景,提车还车任务一次跑通
✅ 精度可观:最大横向跟踪偏差0.08米,平均0.01米
02 研究内容
🏗️ 场景与问题:港口堆场为什么难?
图1是典型的滚装码头布局:装卸区、堆场、多层停车场,之间靠车道连接。转运机器人需要在这样的环境里长距离穿行,频繁经过直角弯和窄道。现有方法要么路径不平滑(A*),要么计算没谱(RRT*),要么优化容易卡住(CHOMP),要么训练依赖大(RL)。

图1. 滚装船堆场车辆存放作业场景示意图。
🚗 机器人模型:四轮转向,但规划用自行车模型
图2是四轮独立转向驱动平台的模型。虽然实际车有四个轮子,但规划时用简化的自行车模型就够了——港口路面好、速度不快,轮胎滑移可忽略。这个模型只有三个状态:位置和航向,控制量是速度和等效前轮转角。
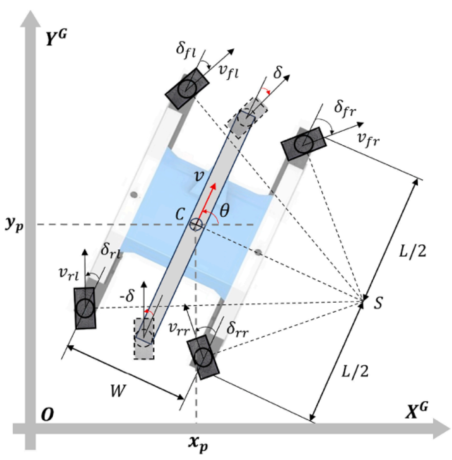
图2. 4WS机器人的运动学模型。
真正的四轮转角可以通过阿克曼几何反算出来,保证轮胎纯滚动不滑移。
🧠 核心思想:把约束“刻”进空间里
常规的路径规划是在平直空间里找一条避开障碍物的路径,运动约束是事后加进去的。这个工作的思路反过来:先把空间“掰弯”,让最短路自己满足约束。
他们定义的黎曼度量由三部分组成:
第一部分:非完整约束
机器人不能横着走,这个约束用度量里的交叉项来体现。如果路径在横向上有分量,会被赋予额外的“长度”代价。
第二部分:转向代价
方向盘打太大也要付出代价。他们把转向角引入度量,当转角接近极限时,代价会快速上升,自然抑制急转弯。
第三部分:障碍物势场
这是最关键的一层。他们把障碍物(矩形、圆形)用势函数表示,离障碍物越近,势能越高。把这个势能乘到整个度量上,意味着在障碍物附近,所有方向的“行走成本”都变高,测地线自然会绕着走。
为了快速计算机器人到障碍物的距离,他们还用了个三圆模型把车身包住,每个圆的半径取到刚好覆盖车身轮廓。
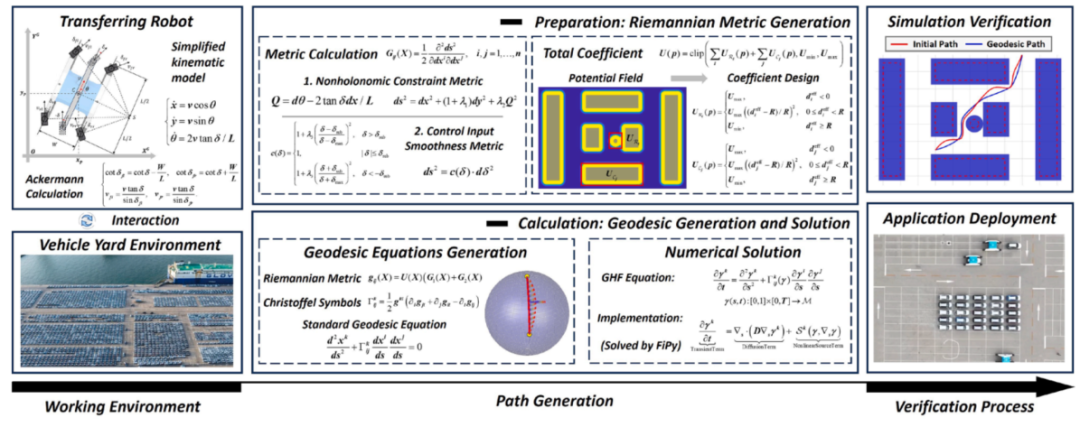
图 3. 基于黎曼流形的测地路径规划框架的总体架构。
🧮 怎么解:几何热流
有了度量,求最短路径就成了解测地线方程。但他们没有直接解两点边值问题——那需要猜初始方向,猜错了发散很快。他们用几何热流法:把路径看成一根弹性绳,引入一个人工时间维度,让绳子在扩散方程的作用下慢慢松弛到最短。
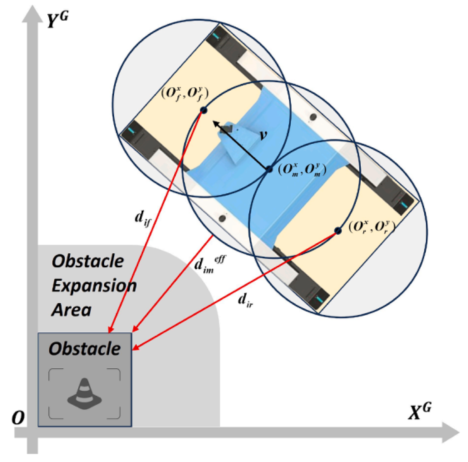
图4.机器人与障碍物的碰撞模型。
初值用A随便给一条(不用考虑运动约束),然后迭代几百步,解就稳定了。图5示意了这个过程。
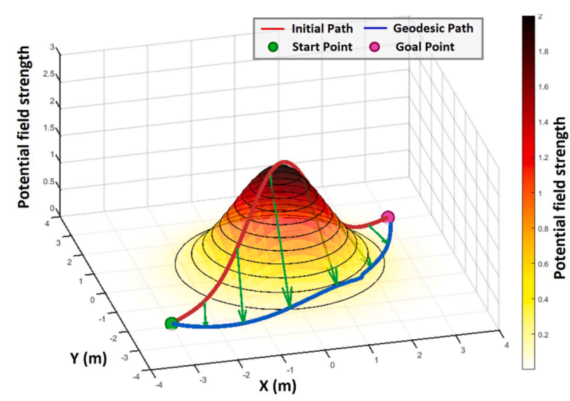
图5 几何热流下的路径演化过程。
🖥️ 仿真实验:宽敞vs狭窄
他们在两种场景下做了对比:宽敞环境和狭窄环境,各三个子场景,跟A*、RRT*、Hybrid A*比了五项指标:路径长度、最大曲率、平均曲率、控制代价、平均障碍物距离、最小障碍物距离、可行性。
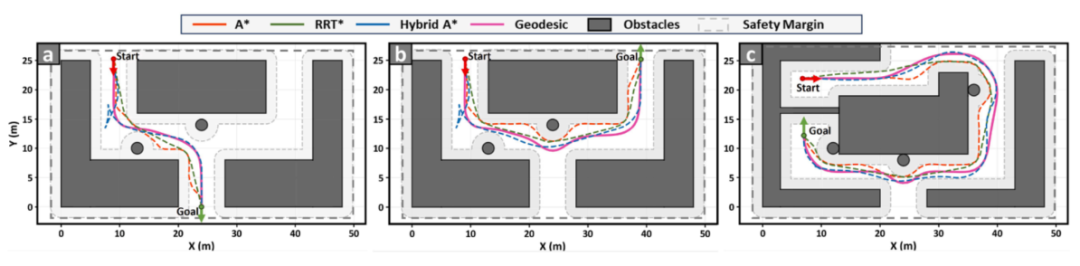
图 6. 宽敞环境中的导航场景。 (a) 连续交替转弯:左-右-左转弯顺序。 (b) 连续单向转弯:同向转弯序列。 (c) 复合转弯:混合转弯模式。
图6是宽敞场景的三个:交替弯、同向弯、复合弯。表3的数据显示,A和RRT*虽然路径短,但曲率大、可行性低;Hybrid A*可行但路径明显长;本文方法在长度、平滑、安全之间平衡得最好,最小障碍物距离明显高于其他方法。
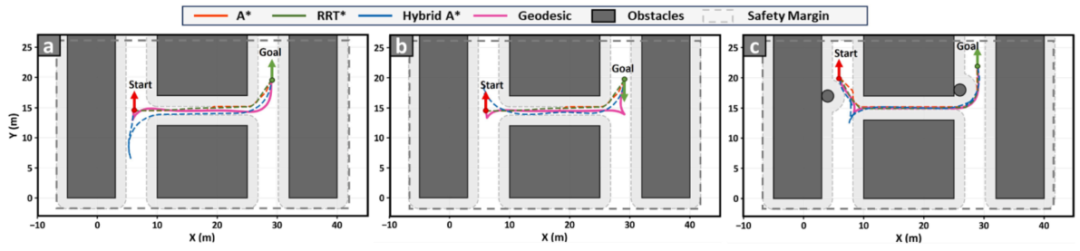
图 7. 狭窄环境中的导航场景。 (a) 前进导航:通过狭窄走廊并进行转弯机动。 (b) 倒车停车:通过狭窄走廊并向后掉头。 (c) 航行受限:走廊较窄,障碍物较多。
图7是窄道场景:前进、倒车、再加障碍。表4更有意思:A*和RRT*在窄道里直接跑出不可行路径(因为没考虑朝向),Hybrid A虽然可行但在前进和倒车场景里给出一模一样的路径——显然不合理。本文方法在窄道里依然保持高可行性,偶尔曲率略超限,但那是为了保安全,可以后处理修正。
表1 不同方法的规划时间比较(平均值和标准差)。
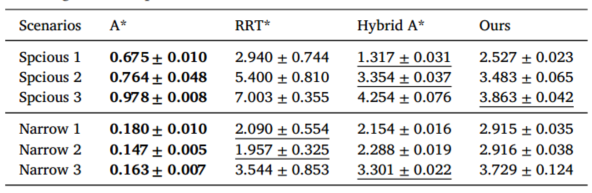
表1是耗时对比:A*最快(但它路径不行),RRT最慢且方差大,Hybrid A*中等,本文方法比Hybrid A*在复杂场景下更快,而且时间更可预测。
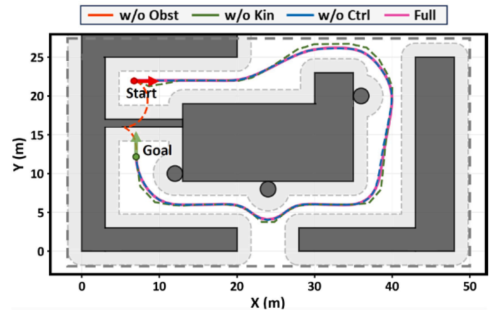
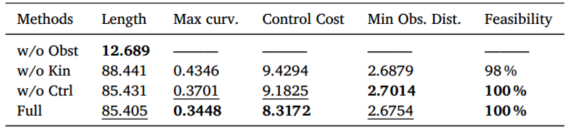
图 8. 不同模型变体的消融实验结果图示。
图8和表2是消融实验,分别去掉障碍物、运动约束、转向代价。去掉障碍物,路径直接穿墙;去掉运动约束,路径曲率变大;去掉转向代价,路径还行但更“抖”。说明三个部分各司其职,缺一不可。
表2 模型变体的消融研究性能。
🚚 实车实验:烟台港,提车还车
最后是真车上路,在烟台港跑了两个典型任务:从充电区去堆场提车,和从堆场去装卸区还车。
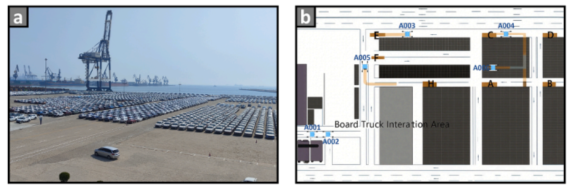
图9.烟台港堆场作业。 (a) 物理实验环境。 (b) 用于路径可视化和机器人状态的远程监控接口。
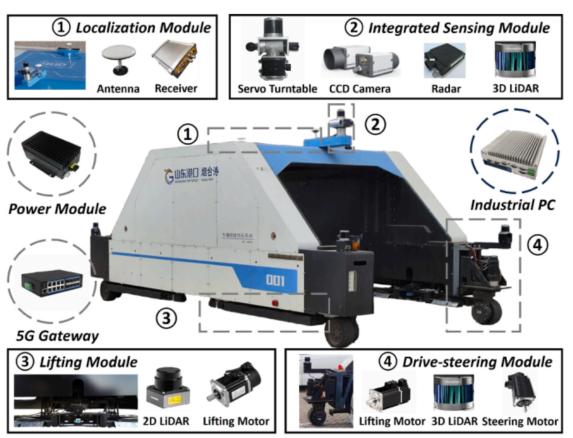
图 10. 传送机器人硬件配置和规格。
图9是现场环境和监控界面,图10是车的传感器配置:激光雷达、毫米波雷达、相机、RTK。
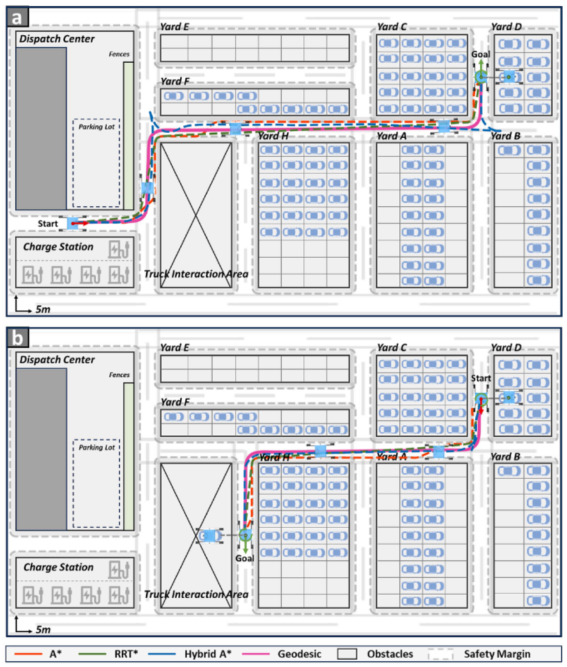
图 11. 机器人操作场景的真实实验。 (a)取车场景:转运机器人从充电站移动至堆场取回商用车。 (b) 车辆还车场景:转运机器人将商用车从堆场运送到卡车交互区。
图11是实际规划的路径叠在卫星图上的效果。表7的数据趋势跟仿真一致,本文方法在安全距离上有明显优势。
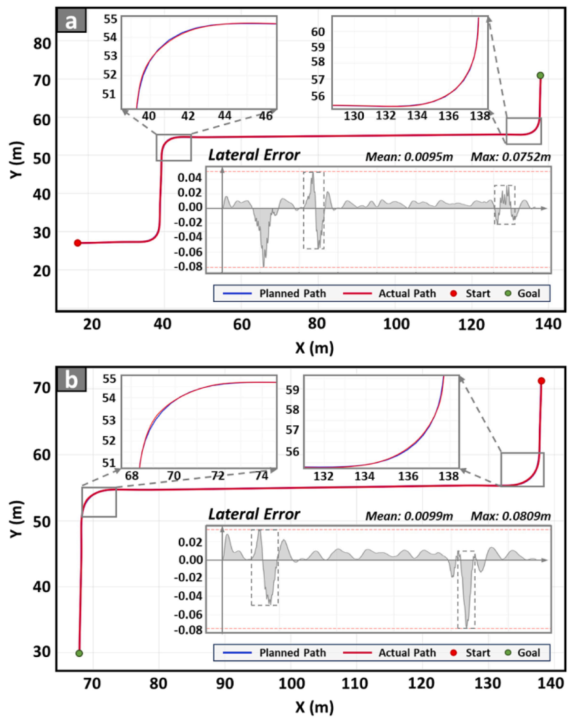
图 12. 现实世界的机器人路径可视化和跟踪误差分析。 (a) 车辆取货场景。 (b) 车辆还车场景。
图12是路径跟踪结果:最大横向偏差0.08米,平均0.01米,说明生成的路径控制点光滑,车能跟得住。
03 创新点①用黎曼流形统一多约束规划
之前也有人把约束加到度量里,但大多是单项的。这篇工作把非完整约束、转向代价、障碍物势场统一成一个复合度量,用一个几何框架同时处理三个问题。这个思路比多目标加权求和更干净——约束不是代价,而是空间的内禀属性。
②障碍物势场直接调制度量
常见做法是在优化目标里加障碍物惩罚项。这里直接把势场乘到整个度量上,相当于改变了空间的局部各向异性。好处是:越靠近障碍物,所有方向的移动成本都变高,测地线自然绕着走;而且因为势场是连续的,优化过程不会出现突变。
③三圆模型的工程巧思
用三个等半径的圆包住车身,比用单个大圆或者精确多边形都方便:碰撞检测快,势场计算简单,还能保持对称性。圆心位置和半径有解析解,保证覆盖车身又不冗余。
④几何热流法解测地线
直接解两点边值问题需要猜初始方向,对复杂度量很容易发散。几何热流法把问题转成抛物型PDE,从一条任意初值开始,让曲线在扩散和平滑的联合作用下演化到稳态。好处是稳定、对初值不敏感,而且可以用成熟的数值求解器(他们用了FiPy)。
⑤多维度评价指标
他们不是只比路径长度,而是用七个指标(长度、最大/平均曲率、控制代价、平均/最小障碍物距离、可行性)全面衡量。特别是引入了“控制代价”和“可行性”,前者反映路径是否难跟,后者直接算曲率超限的比例,对工程落地很有参考价值。
04 总结与展望这篇文章给人的感觉是:从几何底层重新思考了路径规划问题。它不是在一个平直空间里找一条路径,然后再去满足约束;而是先把空间本身设计成“弯曲”的,让最短路径天然就是好路径。
这种方法的好处是模块化:想加新约束,就改度量;想用新求解器,就换数值方法。对于港口这种结构化环境,矩形的障碍物、直角的路网、确定性的运动模型,正好适合这种几何框架。
未来研究将聚焦于以下几个方向:
🔸更一般的障碍物形状:目前用矩形和圆形的势场,如果遇到任意形状的障碍物,可以用凸包近似。关键是要保证势场连续可微,不影响梯度求解。
🔸考虑执行不确定性:现在的规划是确定性的,但实际车的跟踪会有误差。如果把执行的不确定性也建模到度量里(比如在狭窄通道放一个“风险场”),可以进一步提升鲁棒性。
🔸局部实时重规划:当前方法主要用于全局规划,单次4秒算一次可以接受。但遇到动态障碍物时需要快速重规划,可能需要结合快速求解器(比如Runge-Kutta前向迭代)做局部修正。
🔸学习引导初始猜测:A给的初值虽然可行,但有时绕远。如果能用学习的方法(比如从历史数据中学习典型路径)直接给一个更好的初值,可以进一步减少迭代次数。
🔸多机协同调度:如果多个机器人在同一片区域运行,路径规划还要考虑彼此避让。这需要在度量里加上时变的其他机器人位置信息,变成时空联合规划。
从烟台港的实车结果看,这个方法已经具备了工程落地的能力。下一步就是把它放进调度系统里,和任务分配、交通管理、充电调度等模块串起来,真正跑通全流程。