[CV]《Lifting Embodied World Models for Planning and Control》A N. Wang, T Darrell, P Izmailov, Y Bai, A Bar [New York University & UC Berkeley] (2026)
在具身世界模型中,动作维度随关节数暴涨,规划几乎不可控。过去方法受困于直接在关节空间搜索,本质原因是搜索维度与序列长度同时指数膨胀。
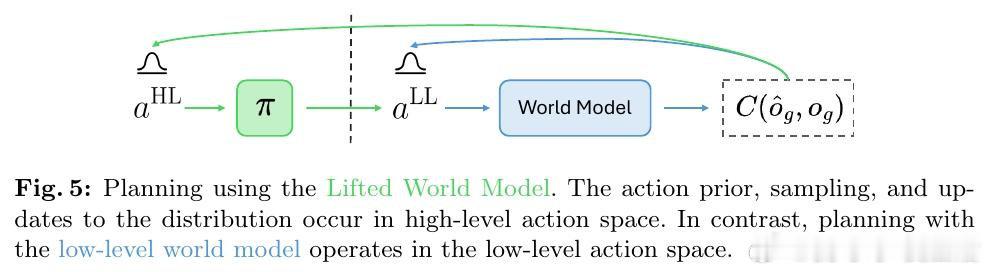
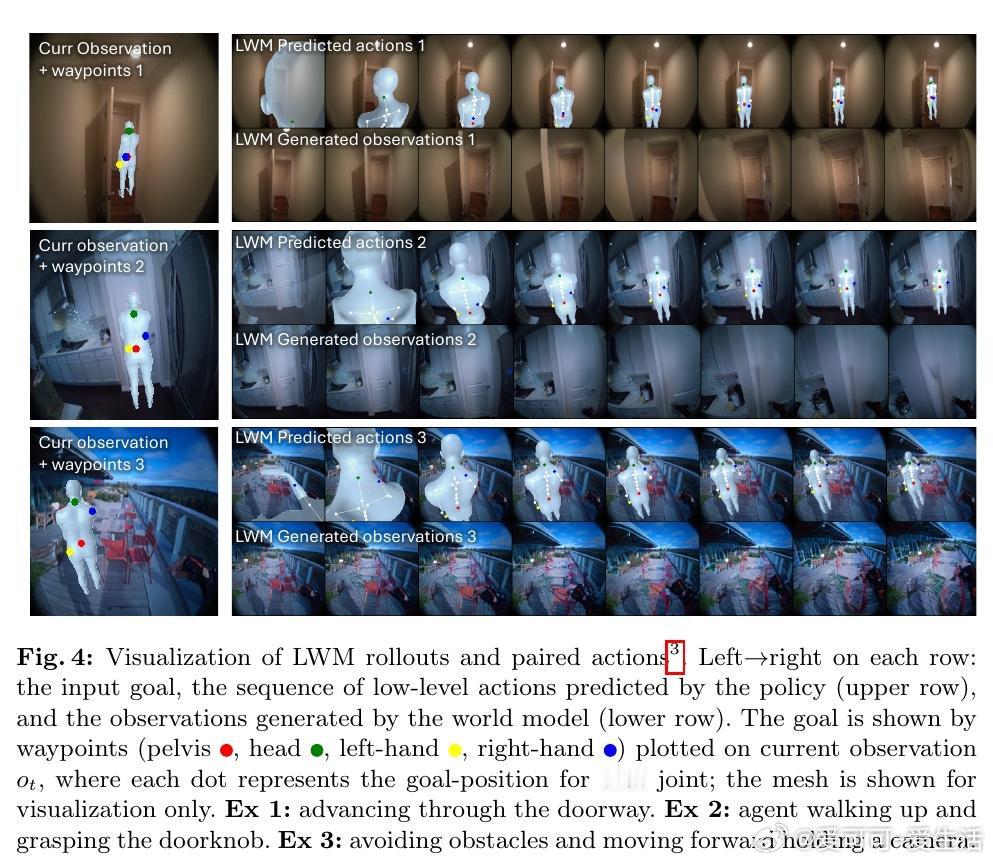
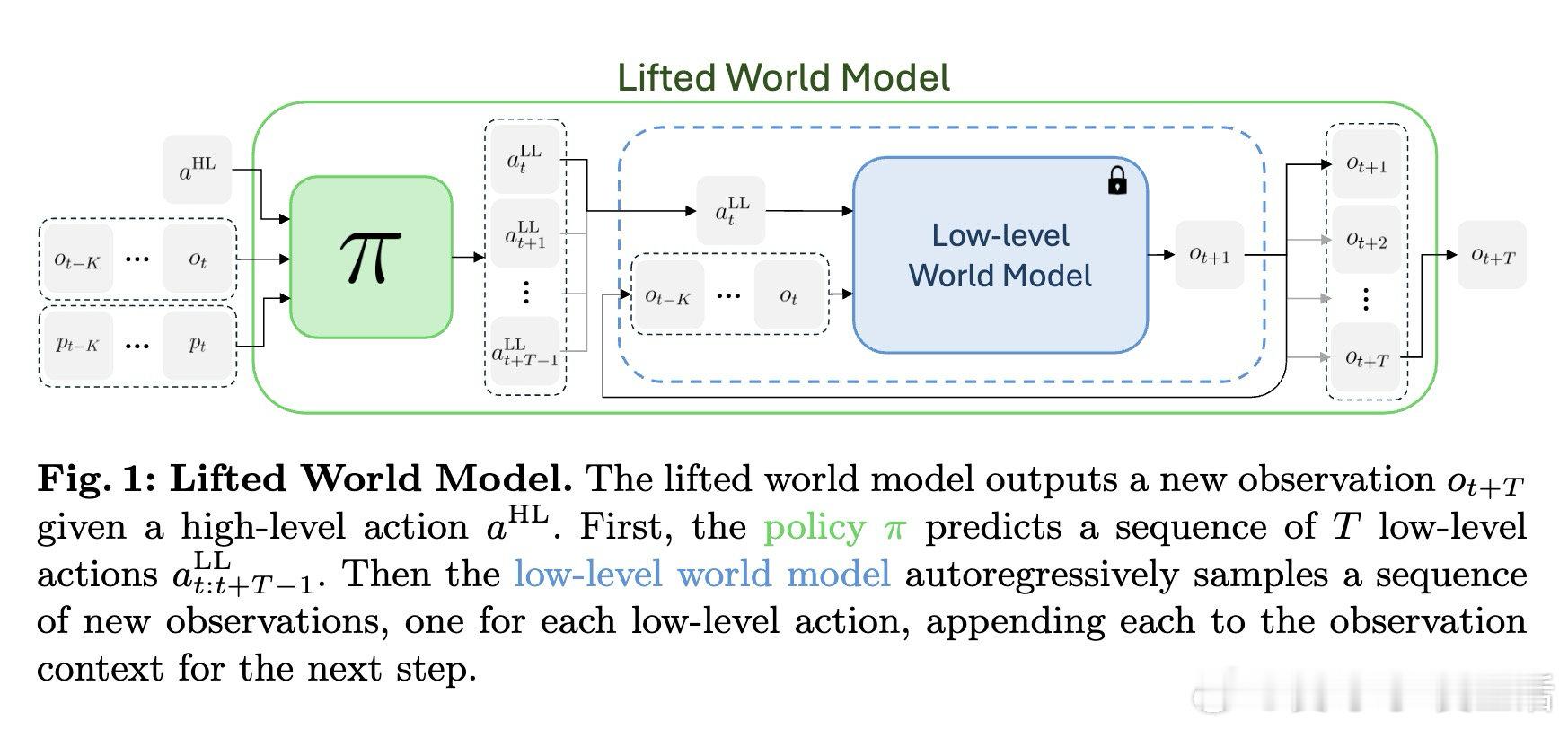
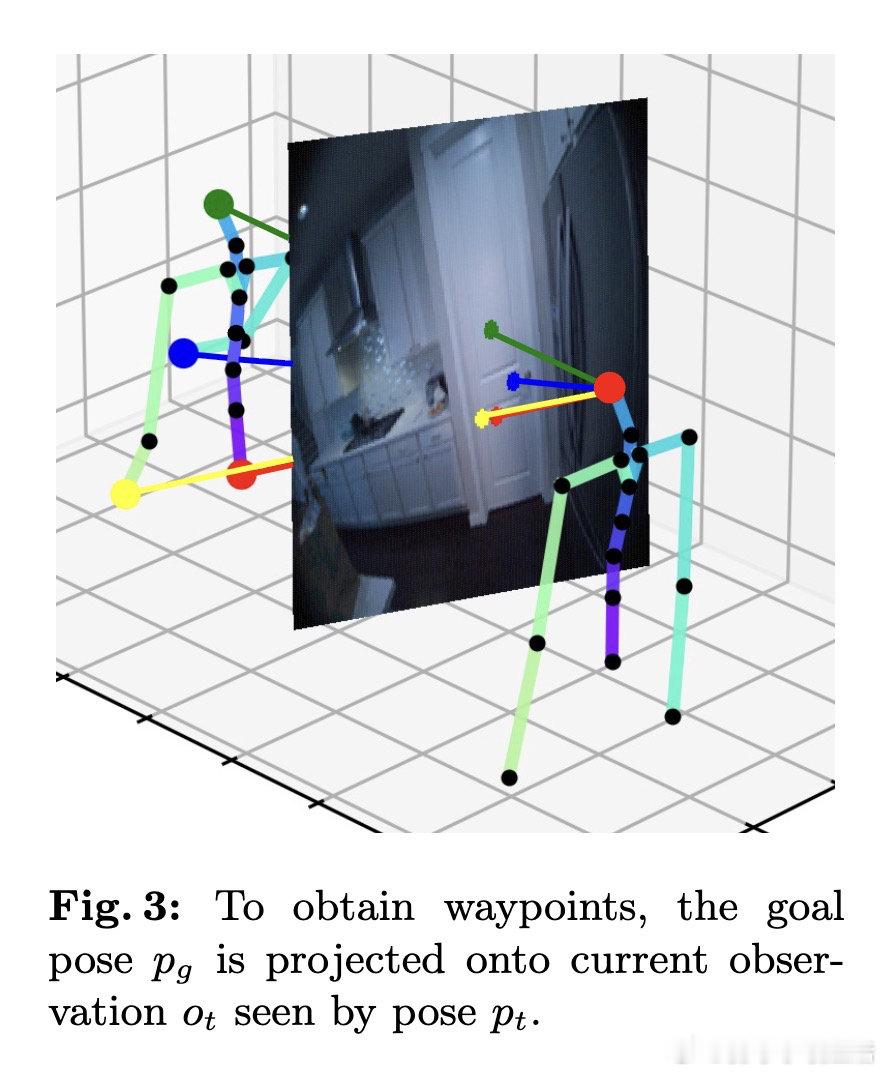
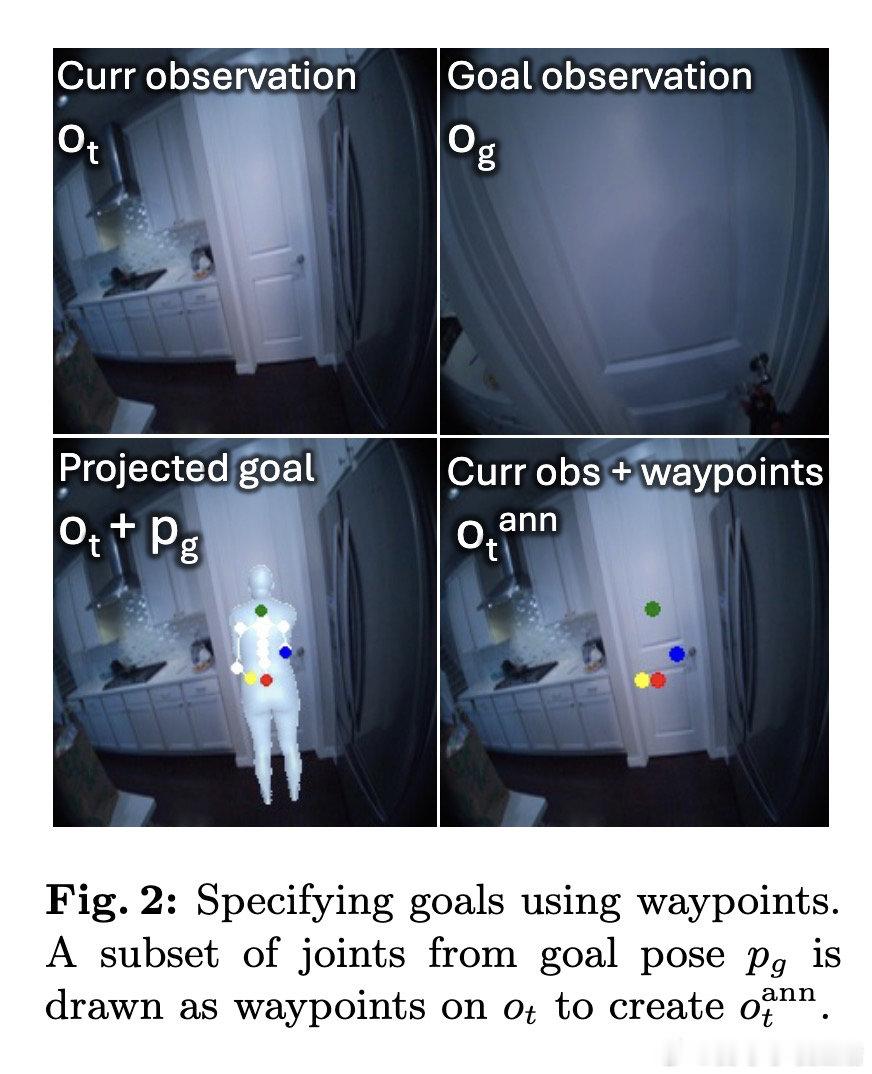
本文的核心洞见是:把“控制动作”重新看作“图像中的少量关键点”。由此,用轻量策略把这些2D目标点展开成关节动作序列,使高维控制压缩为可搜索的低维决策。
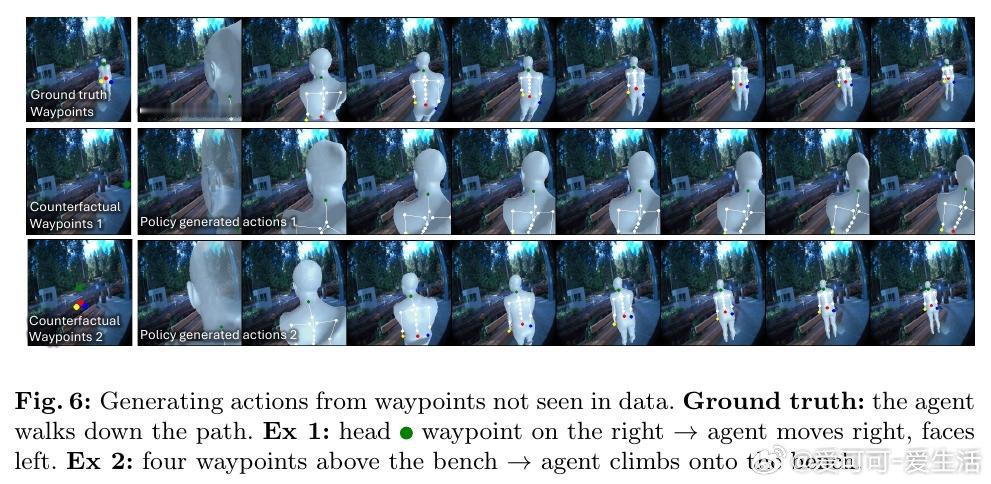
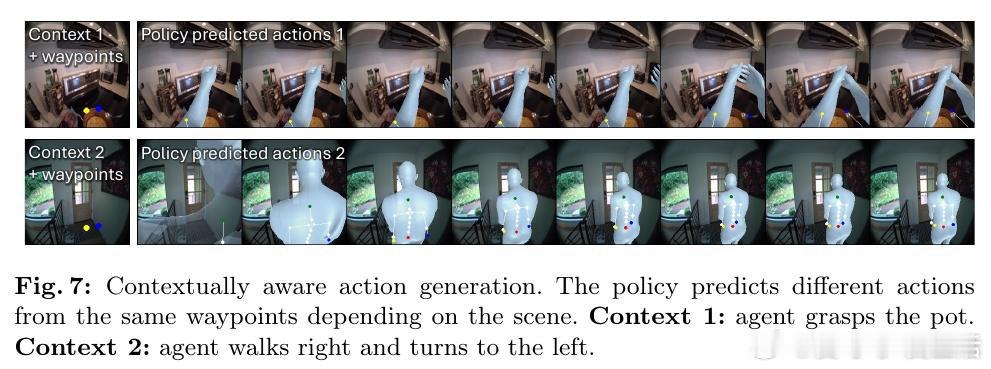
这项工作真正留下的遗产是让复杂身体也能被“点选式”操控。它为后来者打开的新门是用视觉目标驱动规划,但尚未跨过的门槛是视野外目标与精细姿态仍难表达。
arxiv.org/abs/2604.26182 机器学习 人工智能 论文 AI创造营