技术巡猎 蔚来 多源红绿灯信息的显示方法及设备---“车能不能看懂红绿灯”?不是这样的问题,蔚来的问题是“车里不同系统同时说三种答案的时候怎么办”。可能,很多人会以为红绿灯显示就是摄像头识别一下,识别准了就完事了,还真没这么简单。车处理红绿灯的时候有几类信息源,车上的图像采集单元,也就是摄像头;服务器,也就是云端或图商、政府平台给的数据;还有路侧单元RSU,也就是路边基础设施直接把信号灯状态发给车。这些信息出现冲突的时候,怎么办呢?
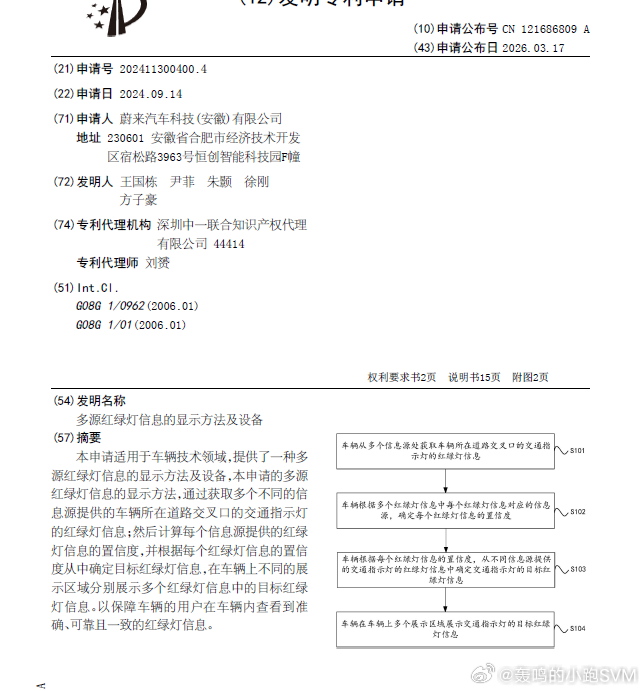
蔚来的做法,会把同一路口、同一个信号灯的信息都收进来,分别算一遍置信度,再从里面挑一个最可信的,统一显示到仪表盘、导航大屏、地图应用这些不同区域。有意思的不是“融合”两个字,而是不同来源的课题分别要如何解决。
摄像头最直观,能直接看见灯色,但容易受逆光、下雨、遮挡影响,所以专利里给它的是中等置信度,例子里大概是6或7。服务器覆盖广,也方便拿到倒计时,但它很多时候依赖网络和历史推算,临时交通管制、倒计时误差这些问题都可能冒出来,所以置信度更低,大概是4或5。RSU这一类,因为直接连着红绿灯控制系统,时效性和准确性都更高,所以它的置信度最高,例子里给到8或9,越靠近源头,越值得信任。
还多做了一步交叉验证。如果至少两个有效信息源给出的红绿灯信息完全一样,比如都说现在是红灯15秒倒计时,那这两个结果的置信度可以直接抬高,甚至高过原来单个最高分。
一个很现实的问题:宁缺毋滥的时候也是有的。比如摄像头被遮住了,服务器断网了,路边根本没部署RSU,或者通信故障了,这些信息源就会被判成无效,不参与最终判断。如果所有来源都拿不到可用信息,那就统一提示“未获取到可用红绿灯信息”,而不是编一个答案出来。
“感知、云端、车路协同、座舱显示”这些原本容易各管各的东西,进入了一套统一的仲裁逻辑里了。用户开车的时候其实并不关心这条信息到底来自摄像头、地图还是路侧设备,但“你最后给我的答案到底对不对“是重要的。往前一步这类方案也不只适用于红绿灯。今天是红绿灯,明天就可能是限速牌、施工区提示、可变车道、潮汐车道,甚至更复杂的道路事件。从“看见”,到“定夺”是个过程,难的还是多路信息打架的时候,谁来拍板,而且拍板之后整个车内界面都得口径一致。
红绿灯是小事,它是屏幕上的一个图标,背后其实是整车智能化到底有没有章法。