技术巡猎 极氪 一种基于坡道的巡航控制方法、装置、设备及车辆。高速上开过巡航的人,大概率都遇到过一种“说不上难受,但就是不高级”的状态。前面没车,开着ACC,按理说应该很轻松,但到了起伏路段,车就不太对了---上下坡补电油门又踩了下刹车,不是特别平顺。尤其是那种长缓坡、连续桥梁、山区高速,看起来车速好像差不多,也很稳定,但整台车的纵向动作却总有点琐碎。工程上这个很容易被说成是标定问题,但其实是巡航系统的“主要矛盾”设定错了。
传统ACC的基本逻辑并不复杂,它主要是观察设定车速和实际车速之间的误差,误差大了就加油门,误差小了就收油门,目标是明确的,尽量把速度拉回设定值。这个思路在平路上没什么问题。但路面一旦有坡度的时候,影响车速的就不只是动力系统了,还有重力沿坡面的分量。上坡天然减速,下坡天然增速,道路本身也在参与整车纵向运动。问题就出在这里。很多巡航系统并没有真正把“坡”当成控制变量来处理。于是控制器看到的世界还是那个老样子:车速掉了就补;车速高了,就降一下,最后的结果就是乘员感受到了细碎的俯仰。
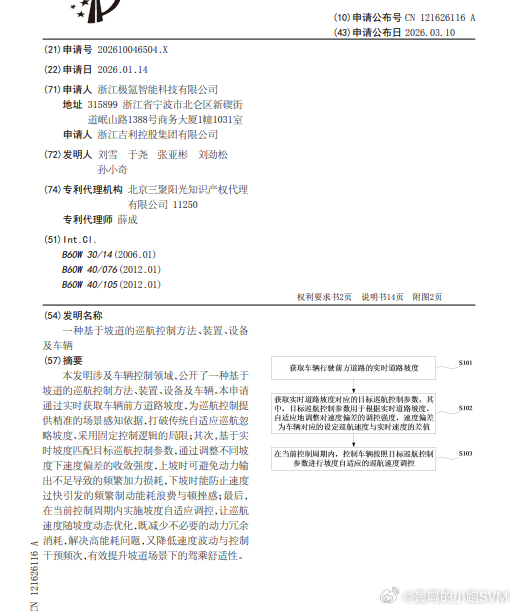
这是极氪这篇专利有意思的地方---前方道路坡度被正式拉进了巡航的控制闭环里。车首先要知道前面到底有多陡---专利里给了两条路。第一,是直接拿数据,来自交通感知数据源,比如高精地图、V2X这类信息,能直接拿到前方道路坡度就直接用。第二,是兜底方案:如果外部数据没有,就基于车辆纵向加速度去反推实时坡度。真实量产系统里,外部数据覆盖率、时效性、定位精度都不可能永远完美,兜底能力在这里非常重要。
有了坡度以后,这套方法的核心动作才开始。它会针对坡度做分区间管理。专利里有一个很典型的思路:小坡、缓坡、陡坡,分别对应不同的控制参数。
一般人会觉得,坡越大系统越要努力把车速拉回来。可这篇专利的方向恰恰相反。坡度越大,它对速度偏差的收敛会变得更克制。也就是说,在大坡场景下,系统会允许车速有更大的合理波动区间,这个判断很有意思,平路上你把速度咬得很紧,问题不大;但在长上坡、长下坡里还这么干,就会陷入另一种低级感:为了守住那1、2km/h的偏差,系统频繁增加动力、频繁回收动力,乘客感受到的是一直有东西在背后推你拽你。
专利里把目标加速度拆成了两部分:一部分来自速度误差,也就是你离设定速度还差多少;另一部分来自坡度补偿,也就是这段坡本身给车带来了多少额外的纵向影响。两部分叠加,得到目标加速度。这套方法还有一个细节,就是它没有让控制参数在不同坡度区间之间硬切。比如车辆刚从平路进上坡,或者从缓坡进陡坡,如果控制增益、补偿强度、急动度限制这些参数突然跳变,车身的体感会立刻下滑,于是专利在这里引入了过渡时间,让参数按周期渐变,把目标加速度增益和目标急动度一点点推到新的区间值上。
这里顺便说一下“急动度”这个词。加速度是速度变化得快不快,急动度就是加速度变化得快不快。一脚电门下去,你觉得身体突然被拽一下,不一定是因为加速度绝对值特别大,也可能是加速度建立得太快。当它不只是处理“要提供多少加速度”,也开始考虑“这份加速度要以多快的节奏给出来”的时候,就从单纯的控制正确,走向了控制体面。
专利里还有一个很实用的安全回退思路。假如当前速度偏差已经大到超过阈值,比如7km/h以上,那系统就不再按原本的坡度分级慢慢来,而是直接切到最严格的控制模式,优先把速度偏差收回来。平常要舒适,但一旦偏差大了,安全和基本控制稳定性优先。还有个不错的地方是它保留了故障安全回退机制。
传感器失效、分级控制器异常,系统就退回传统固定PID模式,同时通过HMI提示驾驶员分级巡航控制不可用。从用户角度看,这套东西带来的变化主要是另一种更难被参数表写清楚的体验。比如同样开着100km/h巡航进入一段持续上坡,过去的车可能会很焦虑地守着100车速,而这种策略会更像一个经验老到的司机,表面上是退让,实际是更高一级的掌控。
坡道作为一个正式控制对象写进巡航逻辑里,本身是种体系意识的体现。