千里科技的CTO杨沐在GTC上分享了千里浩瀚最新的智能驾驶辅助技术架构,围绕 World Model(世界模型,WM) 与 VLA Foundation Model(VLA 基础模型) 构建,采用了VLA 与 E2E2.0 的协同决策感知架构。
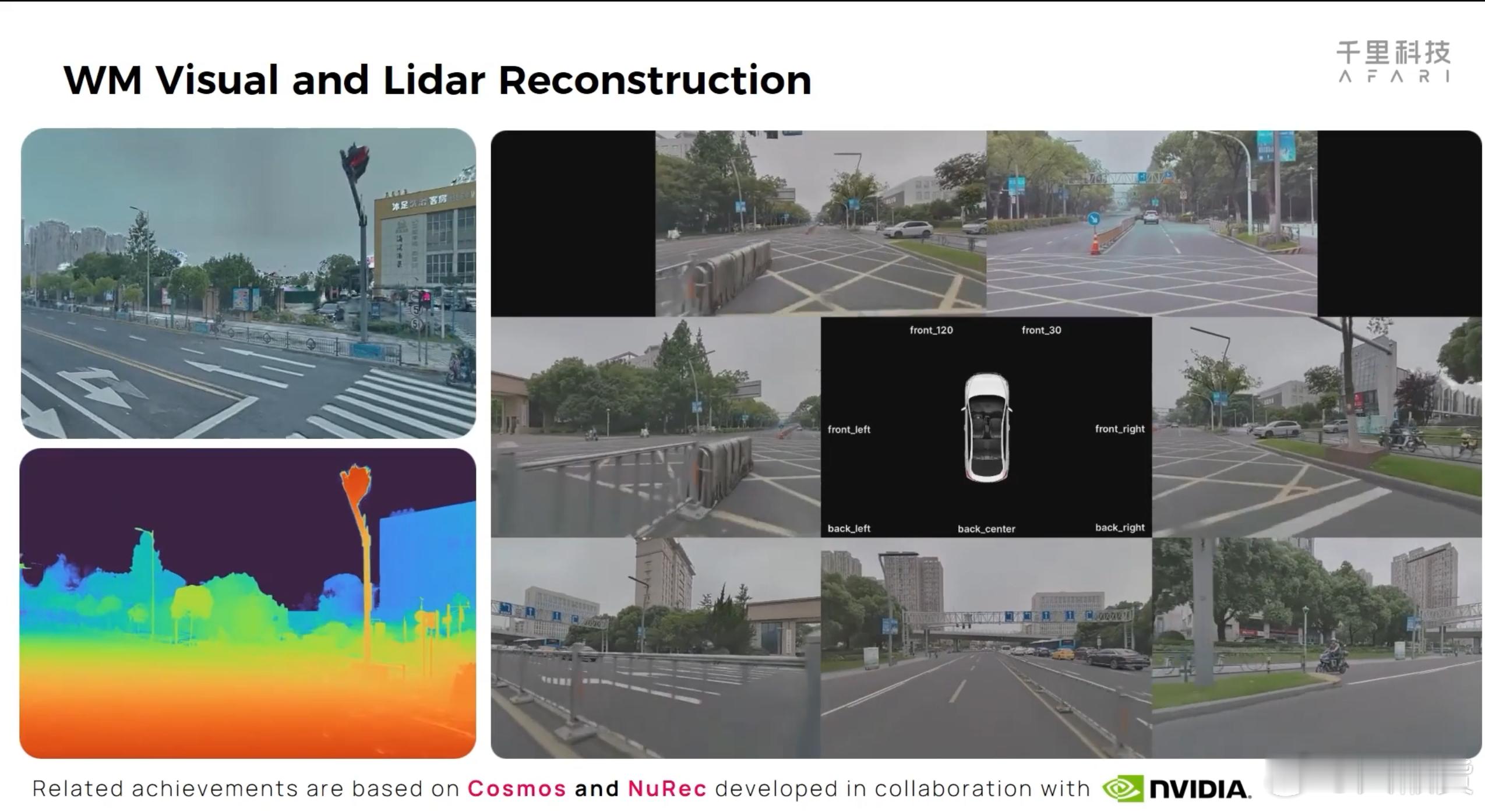
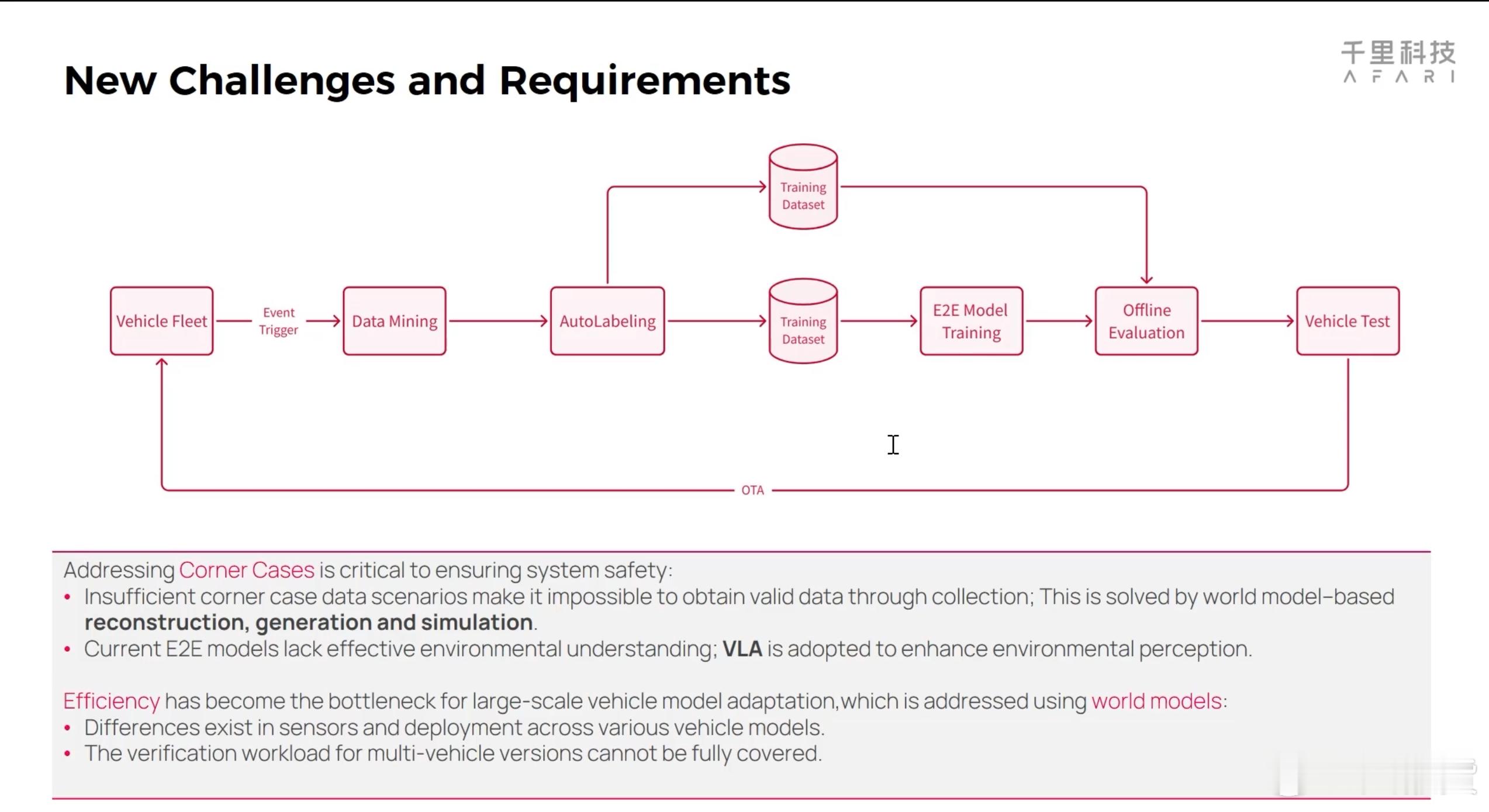
※对于端到端模型模型对于场景种类细分化的需求,采用了通过基于世界模型的重建、生成与仿真解决极端场景数据难采集的问题(图一)
适配车型问题上也将依托世界模型实现跨车型通用适配,覆盖全验证 workload
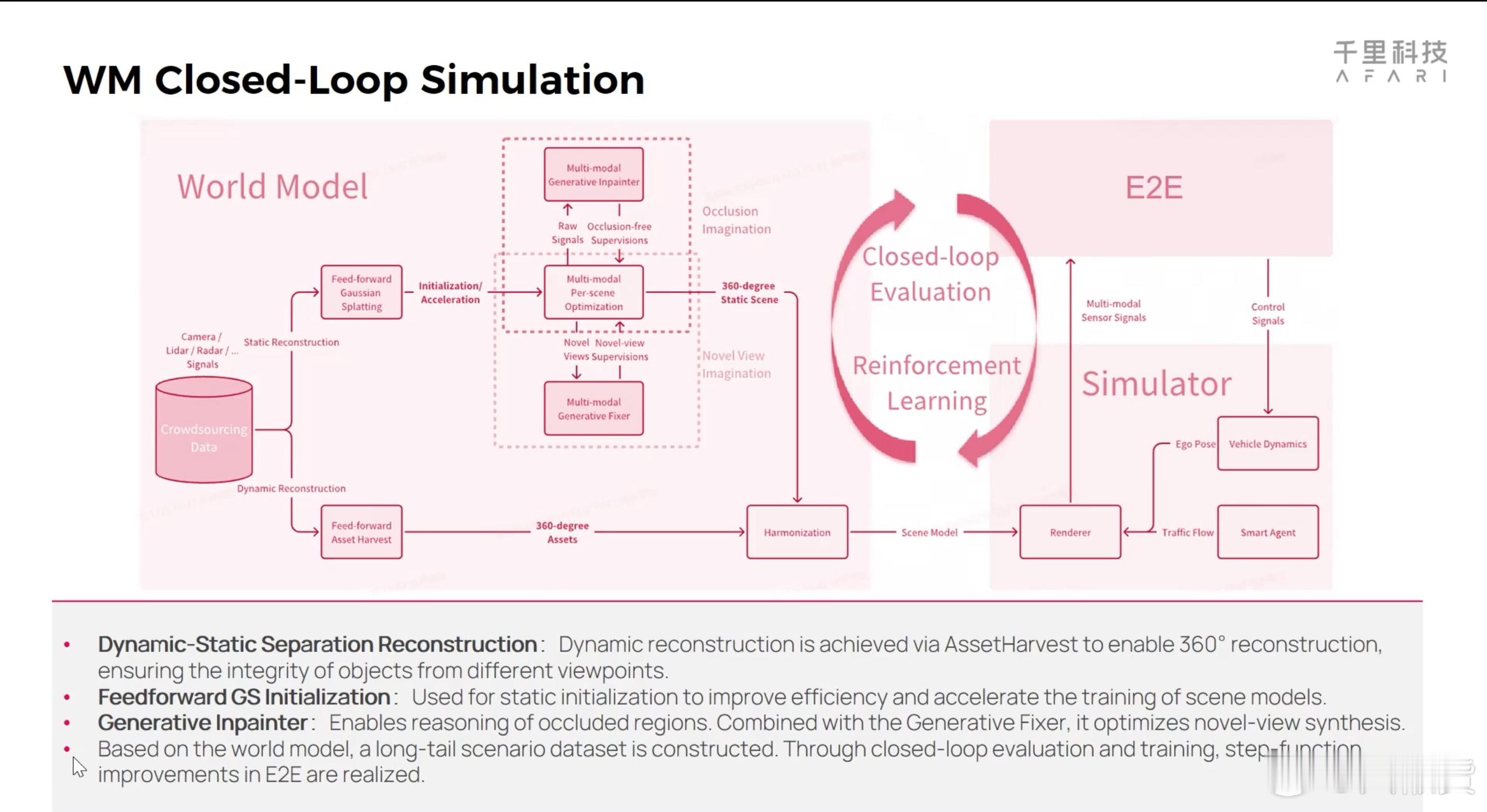
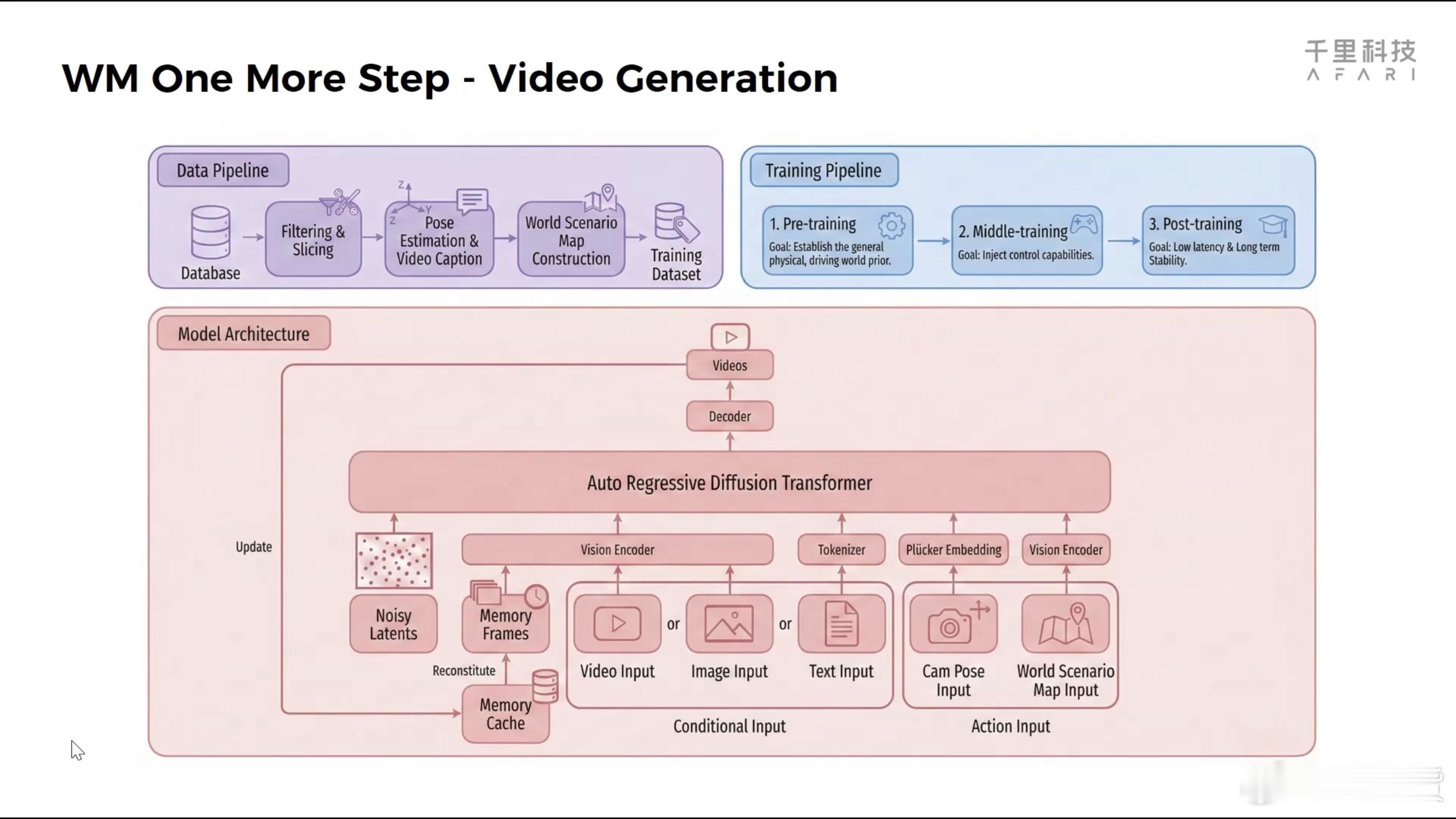
※以World Model(世界模型) 为核心,打通 “感知重建→场景生成→仿真评估→模型迭代” 的闭环(图二),将世界模型生成的场景输入 E2E 模型,通过反馈持续优化模型性能
支持视频 / 图像 / 文本(视觉输入)+ 相机位姿 / 场景地图(动作输入)的多模态条件生成
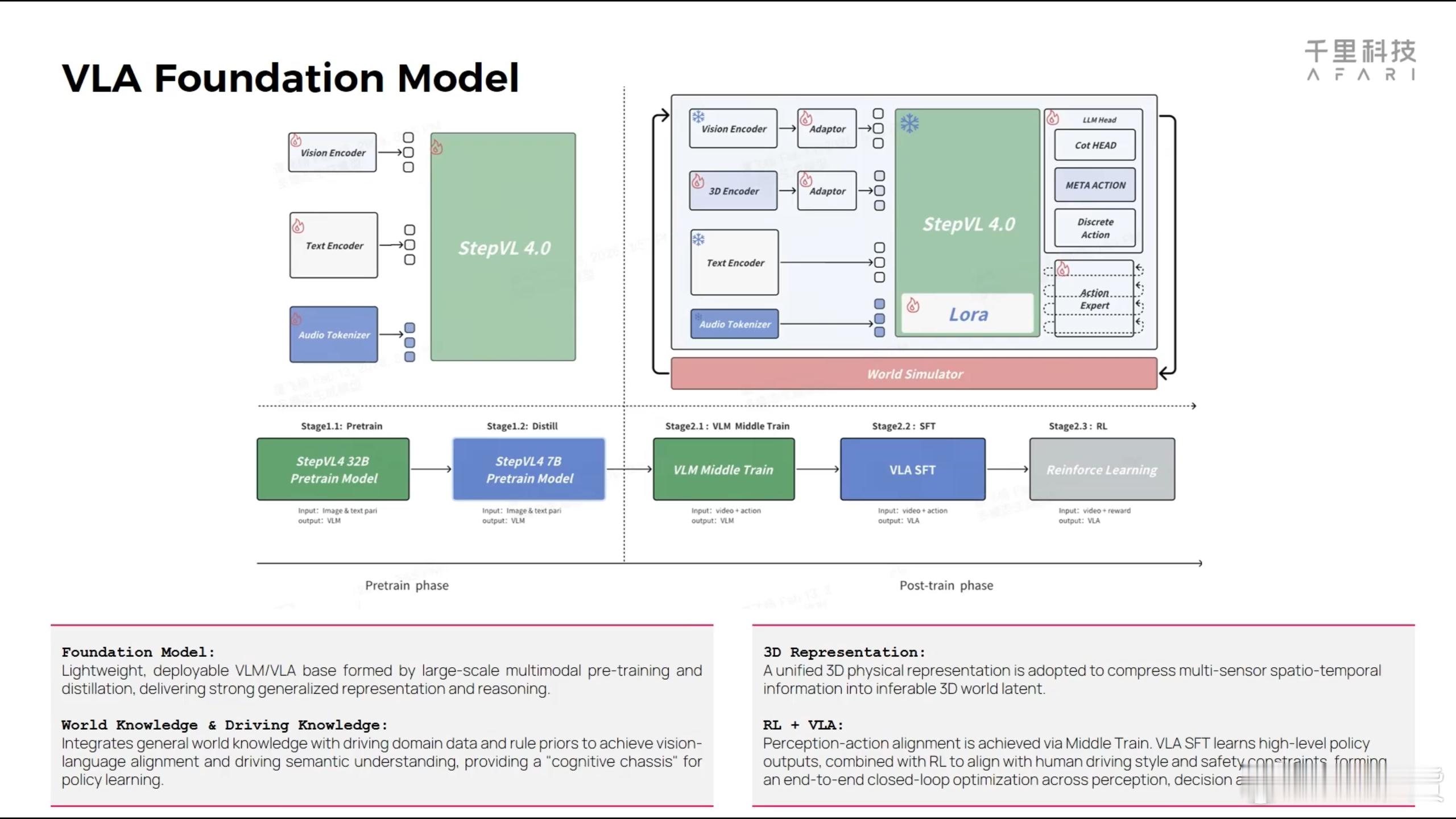
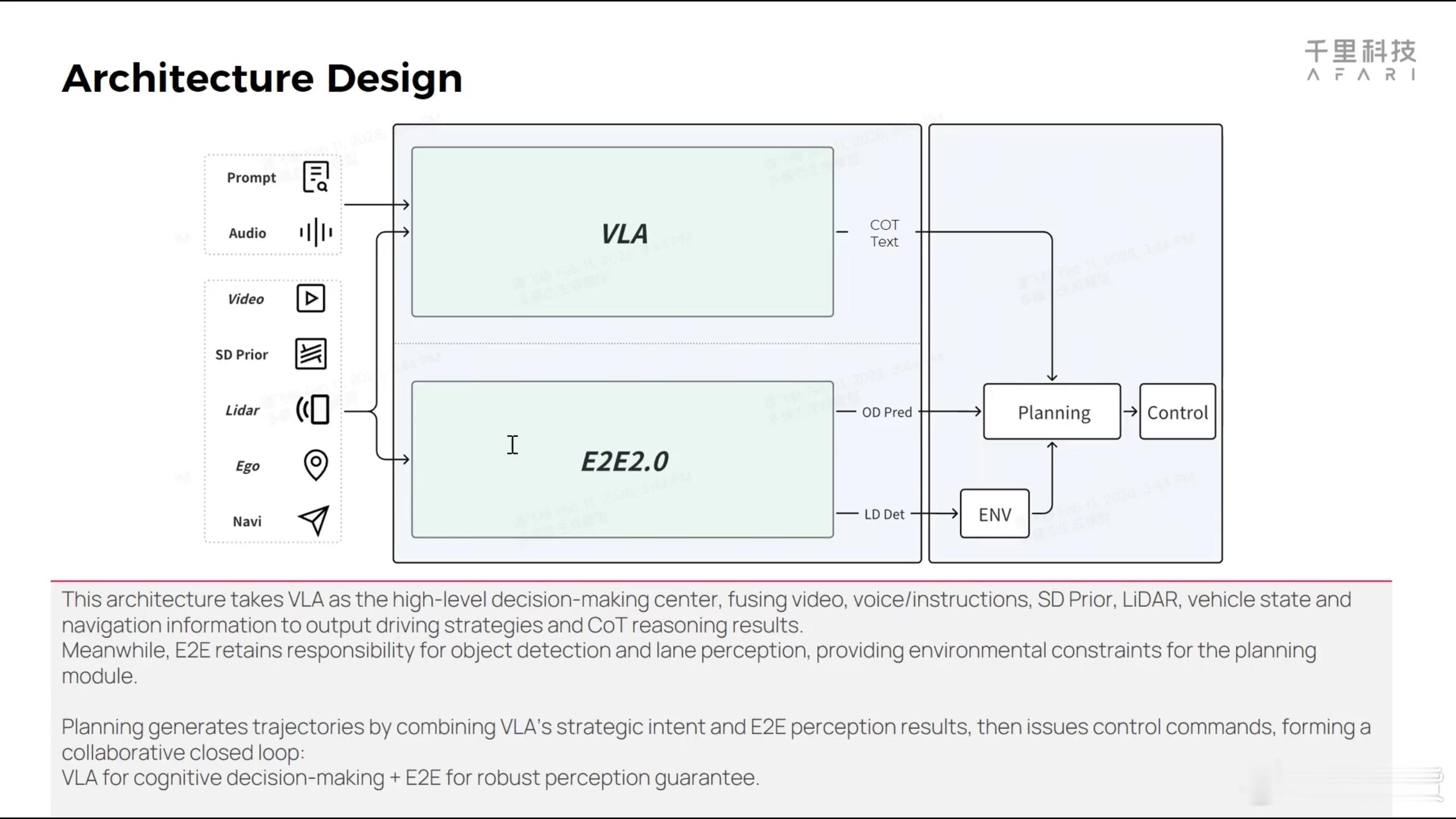
※千里浩瀚采用了端到端 + VLA 协同架构,采用 VLA 做认知决策(推理) ,用E2E2.0 做感知,规划模块结合 VLA 意图与 E2E 感知结果,生成轨迹并下发控制指令(Control),其VLA端侧模型参量达到了7B,差不多Thor要跑满了
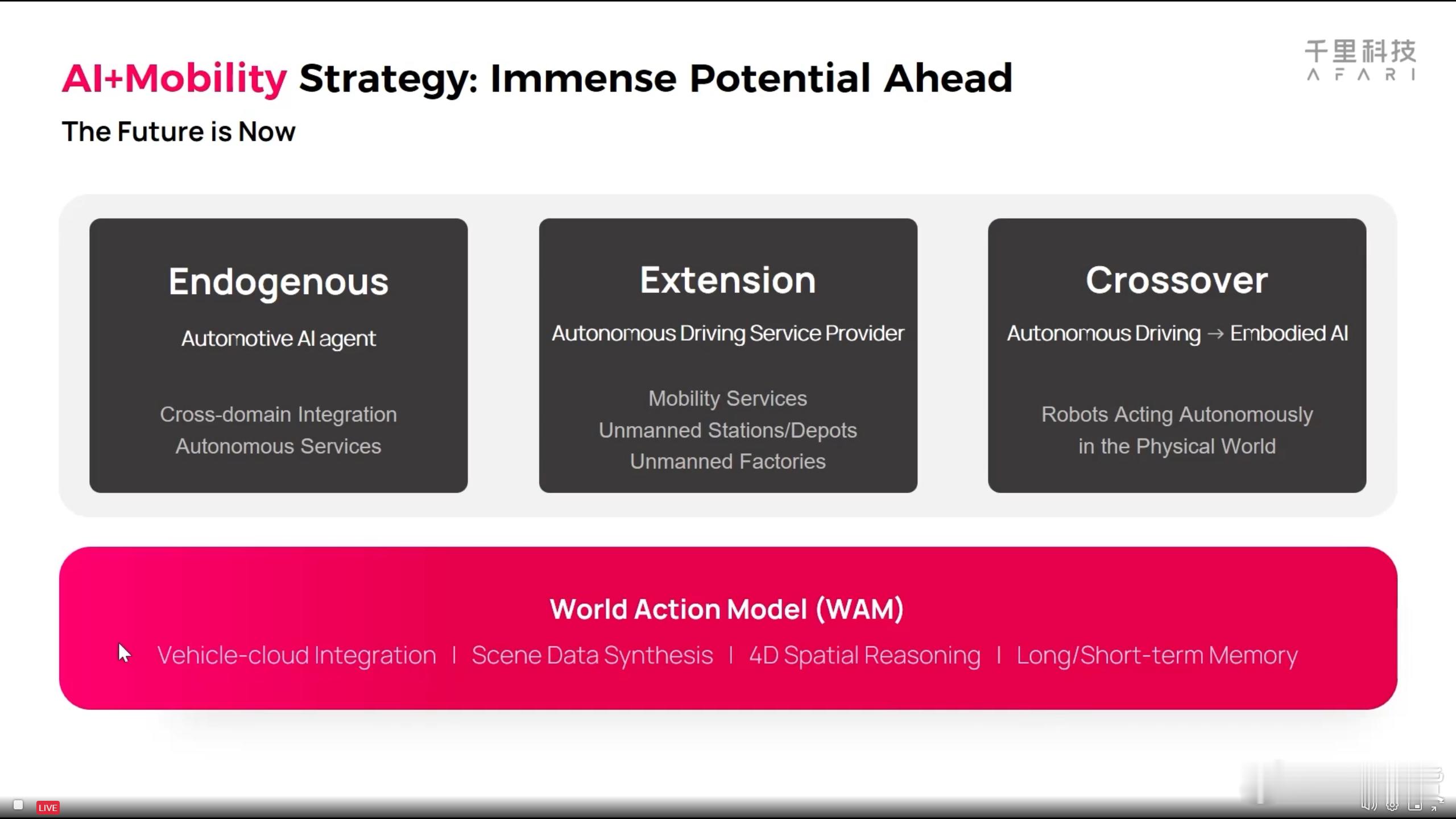
以其自研的 WAM基座为基石,对智驾可以打造车载 AI 智能体,对未来可以实现物理世界机器人自主决策GTC懒博小课堂新能源汽车