技术巡猎 理想汽车 预稳定控制方法、控制系统以及车辆。一台车“稳不稳”,多数人的第一反应还是悬架、轮胎、重心、轴距这些硬件。这倒也没错,可是今天真正拉开差距的地方,其实不只是底盘本体了,而是整车控制系统能不能在危险真正发生前能不能做好预测。
这份专利有意思的地方就在这,在车还没完全失控之前,只是开始露出苗头的时候,就要讨论“后轮转向”的介入了,核心就是根据车辆状态参数和环境状态参数判断工况,再根据方向盘操控参数和对应增益去给后轮设定一个目标转角,目的是在失稳风险出现时适时介入,提高行驶稳定性。为什么这件事值得单独拿出来说呢?因为传统ESP、ESC这类系统,实际上是最后一道防线。你可以把它理解成家里跳闸保护,真出问题了它是一定得动作的。但更高阶的控制,不该只是“出事后兜底”。
这个专利里,系统会看驾驶模式、后轮滑移量、路面附着系数这些信息,把当前工况分成运动、标准、低附着三类。因为稳定控制最怕的是“一招鲜”。运动模式下,驾驶员本来就允许更大的动态,系统阈值就可以放宽;湿滑路面、低附路面、后轮已经有滑移迹象的时候,门限就得提前收紧,不能等车身已经摆起来了再说。背后的思路并不复杂:同样一个方向盘动作,在干地和湿地,在标准模式和运动模式下,风险完全不是一回事。系统要先承认这个现实,后面的控制才有意义。
接下来是它怎么判断“危险快来了”?专利里抓了几个非常典型的信号:方向盘转角、方向盘转速、横摆角速度。其实这里是同时在看三件事:驾驶员想干什么、动作有多猛、车身现在是不是已经开始起反应了。
专利把风险分成三类。第一类是驾驶员快速往外打方向,方向盘转角在变大,转速也很快,而且转向方向和横摆方向一致。这种工况很像高速避让、连续并线这种动作,车实际上不一定已经处于危险之中,但已经在往动态边界移动了。第二类,是驾驶员开始做反打方向的动作,而且横摆已经不小,方向盘方向与横摆方向相反,此时说明驾驶员已经在救车了。第三类则更激进,横摆角速度进一步放大,轮胎开始逼近非线性区域,风险显著上升。
真正关键的不是“有没有横摆”,而在于系统对驾驶员操作节奏和车身响应关系的结合判断。很多控制系统只盯着车身状态,等异常够大才动作,这套方案更像在看一场动作片的前半秒---驾驶员手已经下去了,车身也开始动了,那就别再装作什么都没发生---此时后轮转向就要上场了。专利里的目标后轮转角,是用方向盘转角和方向盘转速分别乘以对应增益后求和得到的。
增益又和车速相关。向盘转角代表驾驶员的转向意图,方向盘转速代表驾驶员操作的激烈程度,两者叠加,基本就能勾勒出“现在是普通转弯、紧急避让,还是极限修正”。第一类风险工况下,专利会对期望后轮角做幅值修正。这类场景里,风险还不算是最高的,系统的目标是先把横摆增益压一压,不要一下子大幅变更一台的车的个性。如果快速打方向,实车里很可能把驾驶员吓一跳。
对于第三类高风险工况下的“相位修正”,是整篇专利里最有味道的地方。简单理解,在驾驶员快速反打方向、车辆横摆又已经比较大的时候,后轮不一定要老老实实继续跟着常规同向逻辑走。要限制期望后转角在反打过程中的变化量,让后轮角变化慢一点,甚至短时间允许前后轮形成一个反向关系,帮助横摆角速度更快衰减。这很像什么呢?像你扛着一根很长的杆子转身,杆子已经甩起来了,你要是还机械地顺着原来的节奏走,摆幅只会更乱;真正聪明的做法,是先把这股惯性消掉,再回到正常动作。后轮转向在这里扮演的,就是那个“抵消惯性”的角色。
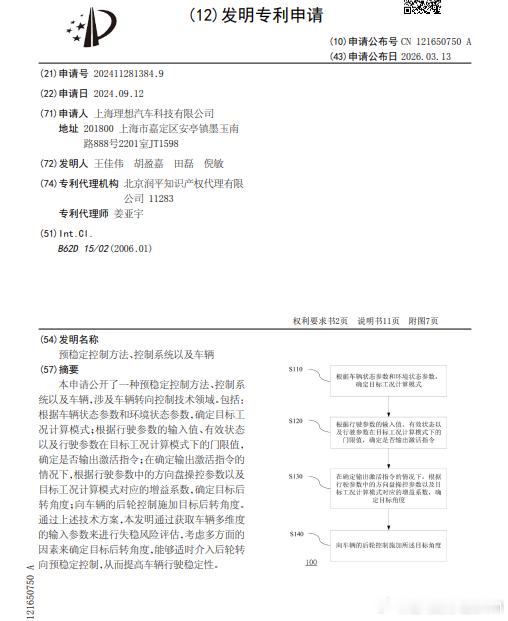
往下它做了三层激活逻辑。第一层先判断有没有足够明显的失稳风险,第二层看信号是不是都有效、车辆状态允不允许介入,第三层还要满足功能安全条件,比如方向盘转角或转速达到安全门限才正式输出激活指令。退出也不是一刀切,得看预稳定控制和常规后轮转向控制的目标角度是不是已经足够接近,或者车辆是不是已经直线稳定跑了一段时间,再平滑退出。
这份专利“不错”的地方,也并不是说它用了后轮转向,主要是它把后轮转向放到了更为关键的位置上。以前后轮转向更多是豪华感、灵活性、操控性的配置语言,现在则是更偏安全域、更偏动态边界管理的事情。
整车控制思路变了:车辆稳定性不再只是机械底盘和ESC单独负责,而是转向、状态估计、环境识别、功能安全、执行器能力一起协同,其实就是今天智能底盘的一条典型路径。