技术巡猎 零跑 车辆补电方法、装置、设备及存储介质。新能源车因为“12V电瓶没电”而趴窝的事听过嘛?困惑都是能理解的,车里明明有几十度、甚至上百度的动力电池,怎么会被一个小电瓶卡住呢?但工程上就是这么设计的。动力电池负责驱动,真正唤醒整车电子系统的,就是那块低压蓄电池。门锁、车机、网关、域控制器、各种ECU,几乎所有电子系统都依赖它供电。一旦这块电池电量过低,整车就挂了。所以新能源车一直在做一件事情---用动力电池给12V电池补电。
听起来简单,但工程问题其实不少。什么时候补?补多少?补多久?如果逻辑不合理,要么经常亏电,要么频繁补电,也有可能影响电池寿命。这零跑这份专利要解决的事情。
传统方案通常会在12V电池上装一个独立传感器,叫IBS(Intelligent Battery Sensor)。它负责监测电压、电流,然后对电池电量做计算,然后通过LIN或CAN网络把数据传到整车控制器,由控制器决定是否启动DCDC给电池补电。看起来不错?但工程上有几个问题。第一就是成本。IBS本身就是一个独立硬件,需要额外的传感器、线束和接口。第二是系统复杂度。IBS采集数据以后,需要通过LIN或CAN网络传递给主节点,再由主节点判断逻辑并控制补电。链路很长,中间任何一段通信异常,都可能导致补电逻辑失效。第三是功耗。很多时候只是为了检测电池电量,就需要唤醒一堆控制器模块,这本身就会增加耗电。
零跑这份专利的思路是……干脆不用IBS,把判断逻辑直接交给区域控制器。也就是说,域控制器自己测电压、自己判断是否补电、自己控制补电过程。怎么做到的呢?
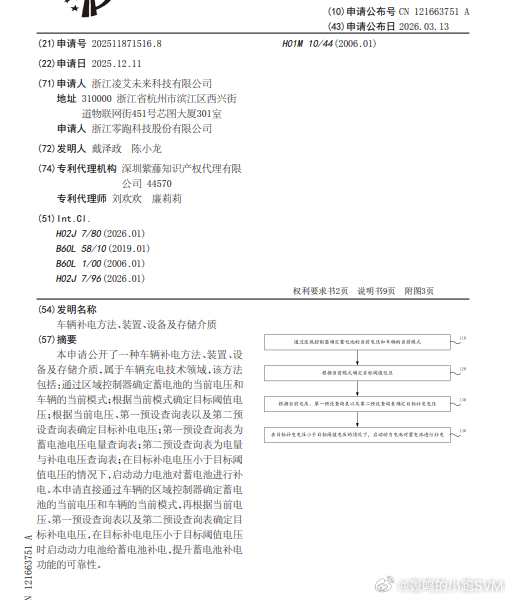
第一步是电压采集。区域控制器通过电压采集模块直接获取蓄电池电压。但实际上直接测到的电压往往不是电池真实电压。因为线束有电阻,接插件有接触电阻,车辆负载也会产生压降。所以专利里做了一步修正:真实电压 = 采集电压 + 线束压降 + 负载压降,线束压降可以根据电流、线长和线阻计算,而负载压降则根据车辆状态预设。例如休眠模式下压降可能是0.2V,而车辆运行时可能达到0.6V。通过这种方式,域控制器可以得到更接近真实状态的电池电压。
接下来是车辆模式判断。车辆通常有两种用电状态,休眠模式和运行模式。在休眠状态下,车辆只有少量后台系统在运行,电压下降往往意味着电池电量确实不足。而在运行状态下,由于负载较大,电压本身就会更低。
因此系统为两种模式设置不同补电阈值。例如休眠模式下,当电压接近12.3V时就可能触发补电,而运行模式下阈值可能会降低到11.7V左右。换句话说,补电判断并不是一个固定电压,而是随车辆状态变化的策略。这套逻辑用了两张MAP表,第一张表是电压与电量的对应关系,通过查表,系统可以把当前电压换算成电池SOC。
第二张表则是电量与补电电压之间的关系。如果SOC很高,补电电压就会低一些;如果SOC较低,补电电压会更高。这种方式可以根据电池状态动态调整补电策略,而不是简单地给一个固定充电电压。当系统算出目标补电电压以后,就会和当前模式下的阈值电压进行比较。如果目标补电电压低于阈值,就说明电池需要补电,这时区域控制器会通过BMS控制动力电池放电,同时启动DCDC,将高压电转换成低压电给蓄电池充电。
还有一张“补电时间MAP表”。也就是说,补电并不是简单地充到某个电压就结束,而是根据电池电量决定补电时长。系统启动补电后会开始计时,时间达到设定值后自动关闭DCDC。这样做的好处是可以避免浮充,同时减少能量浪费。如果把整件事放到整车电子架构里看,其实会发现一个明显趋势。
过去很多功能依赖独立硬件完成,比如IBS这种电池监测传感器,现在越来越多功能被整合进域控制器,用软件逻辑实现。硬件减少了,软件增加了,控制逻辑集中,整车电源管理开始更像一套软件系统,而不是简单的电气连接。这类技术往往不会出现在宣传海报上,但却非常典型。新能源车很多所谓的“趴窝”,并不是动力电池问题,而是低压系统管理问题,如果12V电池管理不好,再大的动力电池也帮不上忙。
所以行业现在其实在两条路上同时推进:一条是48V低压系统,另一条是更智能的低压电源管理策略。
零跑这份专利,就属于后者,把补电逻辑从硬件传感器迁移到域控制器,用软件和MAP表管理补电策略,减少通信链路,提高系统可靠性。很多时候,一辆车的体验,并不是由最大的那块电池决定的,而是由这些看不见的系统细节决定的。