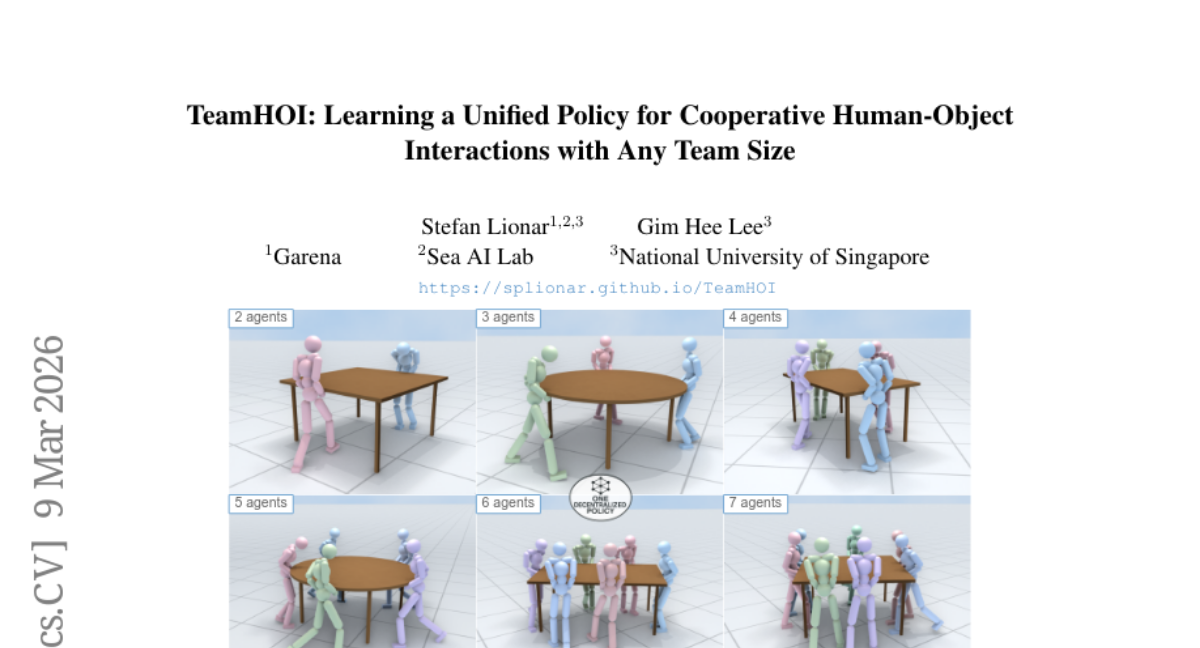
一群机器人手拉手围成一圈,齐心协力抬起一张沉重的桌子,就像真正的人类团队一样默契配合——这听起来像科幻电影的场景,但现在已经成为现实。由新加坡国立大学和Sea AI实验室联合进行的一项突破性研究,成功开发出了名为TeamHOI的智能系统,让虚拟人形机器人学会了真正意义上的团队协作。这项研究发表在2026年3月的计算机视觉顶级会议论文中,论文编号为arXiv:2603.07988v1,感兴趣的读者可以通过该编号查询完整研究内容。
过去,让机器人完成复杂的物理任务已经是一个巨大挑战,而让多个机器人像人类一样协调配合则更是难上加难。就像一个人搬家具时需要朋友帮忙一样,很多现实世界的任务都需要多人协作才能完成。但是让机器人学会这种协作比想象中要困难得多——它们需要理解队友的意图,知道自己该站在什么位置,什么时候用力,什么时候配合别人的动作。
研究团队面临的第一个难题就像组建一个篮球队一样:球队可能有5个人,也可能有10个人,但训练方法必须对任何规模的队伍都有效。传统的机器人控制系统就像为固定人数设计的座椅,只能容纳特定数量的队员。一旦队伍规模发生变化,整个系统就需要重新设计。这种局限性严重制约了机器人团队在现实应用中的灵活性。
第二个挑战更像是缺乏"教练手册"的问题。要让机器人动作看起来自然,研究人员通常需要用真人的动作数据来训练它们,就像给机器人看录像学习一样。但是多人协作的录像资源极其稀缺,就像想找到完美展示团队配合的体育比赛录像一样困难。更麻烦的是,即使找到了这样的录像,也只能教会机器人模仿那种特定的配合方式,缺乏应对不同情况的灵活性。
为了解决这些问题,研究团队开发了一套巧妙的解决方案。他们的核心思想就像培训一支可以随时调整人数的乐队——无论是三重奏还是交响乐团,每个乐手都能根据当前的团队配置调整自己的演奏方式。
一、突破性的智能协调机制
TeamHOI系统的核心创新就像给每个机器人安装了一套"团队感应器"。每个机器人不仅能感知自己的状态和周围环境,还能通过特殊的注意力机制"感受"到队友的存在和意图。这种设计就像人类在团队运动中的直觉一样——篮球运动员在运球时会本能地感知队友的位置和移动方向,从而做出最佳的传球决策。
研究团队采用了基于Transformer的策略网络,这听起来很复杂,但实际上就像给机器人配备了一套"团队雷达系统"。当一个机器人需要做决策时,它会同时关注自己的状态信息和所有队友的关键信息,包括位置、朝向和相对角度。就像经验丰富的足球队长能够同时掌握场上所有队员的动态一样,每个机器人都能对整个团队的状态有清晰的认知。
这套系统最巧妙的地方在于它的"弹性扩展"能力。无论团队有2个成员还是8个成员,同一套策略都能有效工作。这就像一个优秀的指挥家能够指挥任何规模的乐队一样——无论是室内四重奏还是百人交响乐团,音乐的和谐原理是相同的,只是需要调整协调的复杂度。
在训练过程中,系统会同时在不同规模的队伍中学习,从2人小组到8人大队都有涉及。这种"多队伍轮换训练"的方式就像让一个运动员同时参加双打、四人赛和团体赛,最终培养出能够适应任何团队配置的全能选手。
二、创新的动作学习策略
解决了团队协调问题后,研究团队还面临着另一个挑战:如何让机器人的动作看起来自然而真实。传统方法就像只能照搬整套武术套路,但现实中的团队协作需要更多的即兴发挥和适应性调整。
研究团队提出了一种叫做"遮罩对抗运动先验"的巧妙方法。这个名字听起来复杂,但原理很简单:就像学习舞蹈时先掌握基本步伐,然后在关键部位加入自由发挥一样。他们让机器人学习单人的基础动作(如走路、侧移),但在需要与物体交互的身体部位(主要是手臂和手部)进行"遮罩"处理,允许这些部位根据任务需求自由调整。
这种方法的精妙之处就像教孩子画画:先教会他们画人物的基本轮廓和姿态,然后在手部动作上给予自由创作空间,让他们根据不同的情境画出挥手、握手或者抱东西的动作。通过这种方式,一套基础的走路动作可以演变出搬运、推拉等多种协作行为。
在实际训练中,系统会使用两套"评判标准"。一套负责评判整体动作的自然性,确保机器人走路、站立等基本动作看起来像真人一样流畅。另一套专门关注手部与物体的交互,通过任务奖励来指导机器人学会合适的抓取、支撑动作。这就像同时有两位教练,一位负责纠正基本姿态,另一位专门指导技术动作的精准性。
三、实战测试:协作搬桌子的挑战
为了验证TeamHOI系统的实际效果,研究团队设计了一个既具挑战性又贴近现实的测试任务:让机器人团队协作搬运桌子。这个看似简单的任务实际上包含了团队协作的所有关键要素。
测试中的桌子有三种不同形状:正方形、长方形和圆形,重量在50到70公斤之间。机器人们需要从随机的起始位置出发,自主找到最佳的站位,然后协调一致地抬起桌子,运送到指定地点并稳妥放下。整个过程就像现实生活中搬家时的情景,需要团队成员之间的默契配合。
最有趣的是,系统并不会预先告诉每个机器人应该站在哪里,就像真实的搬家场景中没有人在地上画好站位线一样。机器人们必须通过互相观察和协调,自动形成最有利于搬运的阵形。研究团队在桌子边缘设置了64个候选接触点,机器人们需要从中智能选择最合适的位置。
为了指导机器人形成稳定的搬运阵形,研究团队开发了一套巧妙的"队形奖励机制"。这套机制包含两个主要组件:角度分布奖励和主轴覆盖奖励。
角度分布奖励就像确保围桌而坐的人员分布均匀一样。当机器人们围绕桌子分布时,系统会计算相邻机器人之间的角度间隔,并鼓励它们形成均匀分布。对于m个机器人的团队,理想的间距应该是360度除以m。这样确保了每个方向都有足够的支撑力,避免桌子在某个方向失去平衡。
主轴覆盖奖励则更加精巧,它关注的是机器人们是否沿着桌子的"受力主轴"分布。就像抬担架时需要有人在头部和脚部一样,每个物体都有其天然的稳定轴线,沿着这些轴线分布力量能够提供最稳定的支撑。系统会分析桌子的几何形状,找出这些关键轴线,然后鼓励机器人沿着这些方向站位。
四、令人惊喜的实验结果
经过大量测试,TeamHOI系统展现出了令人印象深刻的性能。在标准重量的桌子搬运任务中,无论是2人小队、4人中队还是8人大队,成功率都保持在97%以上。这意味着几乎每次任务都能圆满完成,达到了人类团队的协作水平。
更令人惊讶的是,当研究团队将桌子重量增加到5倍(相当于从70公斤增加到350公斤)时,TeamHOI系统仍然表现出色。在这种"重量级挑战"中,2人和4人小队确实力不从心,但8人大队的成功率仍然达到了81%。这说明系统不仅学会了基本的协作模式,还掌握了根据任务难度调整团队规模的智慧。
在动作流畅性方面,系统同样表现优异。研究团队通过测量"平均绝对加速度变化率"来评估动作的平滑性,结果显示TeamHOI生成的动作轨迹非常平滑,避免了机械式的僵硬感。整个搬运过程看起来就像训练有素的搬家团队在工作一样自然流畅。
更重要的是,系统展现出了出色的泛化能力。当面对训练时未见过的桌子尺寸(更小的桌子和更大的桌子)时,机器人们仍能保持良好的协作表现。甚至在面对12人和16人的超大团队时,系统也能产生协调一致的动作,尽管这远超过了训练时的最大8人规模。
五、技术突破的深层意义
TeamHOI系统的成功不仅仅在于解决了一个技术难题,更重要的是它为未来的人机协作和多机器人系统开辟了新的可能性。在现实世界中,很多任务都需要多个智能体的协调配合,从工厂的协作机器人到救援现场的无人机群,从智能交通系统到太空探索任务。
这项研究的一个关键突破在于证明了"分布式智能"的可行性。每个机器人都运行着相同的策略网络,但能够根据当前的团队配置和环境状况做出独立而协调的决策。这就像一群经过相同训练的专业救援人员,即使在没有统一指挥的情况下,也能凭借共同的专业素养完成复杂的救援任务。
研究团队还展示了系统的多样化应用潜力。除了基本的边缘抓取,机器人们还能学会侧面支撑等不同的搬运策略,并根据物体的形状和队伍的配置自动选择最适合的方法。这种适应性就像经验丰富的搬运工人能够根据家具的特点选择不同的搬运技巧一样。
从技术角度看,这项研究还为解决"样本稀缺"问题提供了新思路。在很多实际应用中,获得高质量的多智能体协作数据是极其困难和昂贵的。TeamHOI的遮罩学习方法证明了可以通过巧妙的技术设计,从有限的单体数据中学习出丰富的协作行为。
六、面向未来的无限可能
TeamHOI系统的成功为我们展示了一个充满可能性的未来。在不远的将来,我们可能会看到这样的场景:一群家用机器人协作重新布置客厅家具,一队工业机器人在工厂中默契配合完成复杂的装配任务,或者一群救援机器人在灾难现场协调搜救工作。
这项技术对于游戏和娱乐行业也有着重大意义。游戏开发者可以利用这种技术创造出更加真实和智能的非玩家角色(NPC)团队,让虚拟世界中的角色展现出真正的团队精神和协作智慧。动画制作领域也可以受益于这种技术,自动生成复杂的多角色协作场景,大大减少人工动画制作的工作量。
从更广阔的视角来看,TeamHOI代表了人工智能从"单兵作战"向"团队协作"演进的重要里程碑。过去几十年,AI研究主要集中在让单个智能体变得更强大、更聪明。但现在我们开始意识到,真正的智慧往往来自于群体的协作和涌现。
当然,这项技术的发展也带来了新的思考。随着机器人团队协作能力的增强,我们需要考虑如何确保这些系统的安全性和可控性。就像管理一支人类团队需要明确的规则和监督机制一样,管理机器人团队也需要相应的安全保障和伦理框架。
研究团队表示,他们的下一步目标是将这种协作能力扩展到更多类型的任务中,比如协作组装、协作维修等。他们还计划研究如何让机器人团队与人类更好地协作,创造真正的人机混合团队。
说到底,TeamHOI不只是一个技术突破,它更像是在向我们展示协作的力量。无论是在机器世界还是人类社会,真正的成就往往来自于团队成员之间的默契配合和相互支撑。这项研究让我们看到,即使是冷冰冰的机器,也能学会温暖的团队精神。也许在不久的将来,当我们看到一群机器人手拉手完成任务时,会想起人类合作的美好,以及科技如何帮助我们更好地理解协作的本质。如果对这项研究的技术细节感兴趣,读者可以通过论文编号arXiv:2603.07988v1查询完整的研究内容。
Q&A
Q1:TeamHOI系统是什么?
A:TeamHOI是由新加坡国立大学开发的AI系统,能让多个虚拟机器人像人类团队一样协作搬运重物。它的特别之处在于一套策略可以适用于任何规模的团队,从2个到8个机器人都能有效协作。
Q2:机器人怎么知道该站在什么位置搬东西?
A:系统不会预先指定站位,而是让机器人通过"团队感应器"互相感知位置和意图,自动形成最稳定的搬运阵形。就像有经验的搬家工人会自动选择最佳位置一样,机器人也能智能分布到桌子周围的最优点位。
Q3:这项技术有什么实际用途?
A:这项技术可以应用于工厂的协作机器人、家用机器人团队、救援机器人群等场景。在游戏和动画制作中,也能创造出更智能真实的虚拟角色团队。未来还可能发展为人机混合协作团队。